toutes catégories
-
Circuits intégrés (ci)
Circuits intégrés (ci)
- Interface - Capteur, tactile capacitif(642)
- ICs spécialisés(12302)
- PMIC - régulateurs de tension - titrisation(5644)
- PMIC - régulateurs de tension - contrôleurs de régulateur linéaire(793)
- PMIC - régulateurs de tension - Linear + commutation(1829)
- PMIC - régulateurs de tension - linéaire(70981)
- PMIC - régulateurs de tension - régulateurs de commutation CC CC DC(39569)
- PMIC - régulateurs de tension - contrôleurs de commutation CC CC(13507)
- PMIC - référence de tension(9453)
- PMIC - V/F et F/V convertisseurs(145)
- PMIC - gestion thermique(592)
- PMIC - superviseurs(47946)
- PMIC - RMS pour convertisseurs DC(170)
- PMIC - Contrôleurs d'alimentation, moniteurs(2104)
- PMIC - Power Over Ethernet (PoE) contrôleurs(1008)
- PMIC - Gestion de l'alimentation - spécialisée(7722)
- PMIC - Commutateurs de distribution d'alimentation, conducteurs de chargement(7706)
- PMIC - PFC (Power Factor Correction)(1222)
- PMIC - ou contrôleurs, Diodes idéales(705)
- PMIC - chauffeurs, contrôleurs(4712)
- PMIC - éclairage, contrôleurs de Ballast(560)
- PMIC - LED Drivers(7282)
- PMIC - Laser pilotes(573)
- PMIC - contrôleurs permutable à chaud(2816)
- PMIC - Gate pilotes(7083)
- PMIC - pilotes complets, demi-pont(1342)
- PMIC - comptage d’énergie(654)
- PMIC - pilotes d’affichage(1435)
- PMIC - règlement/gestion actuelle(1481)
- PMIC - gestion de la batterie(5553)
- PMIC - chargeurs de batterie(3831)
- PMIC - Convertisseurs CC AC, commutateurs hors ligne(4905)
- Mémoire - contrôleurs(358)
- Mémoire - Configuration Proms pour FPGA(639)
- Mémoire - Batteries(13)
- Mémoire(65694)
- Logique - fonctions de Bus universel(706)
- Logique - traducteurs, Shifters niveau(2854)
- Logique - logique de spécialité(1870)
- Logique - commutateurs de signal, multiplexeurs, décodeurs(9420)
- Logique - registres à décalage(2665)
- Logique - générateurs de parité et vérificateurs(335)
- Logique - multivibrateurs(831)
- Logique - loquets(3658)
- Logique - portes et onduleurs - multifonction, configurable(1687)
- Logique - Gates et onduleurs(16453)
- Logique - tongs(7780)
- Logique - mémoire FIFO(4240)
- Logique - compteurs, diviseurs(3456)
- Logique - comparateurs(592)
- Logique - tampons, chauffeurs, récepteurs, émetteurs-récepteurs(17835)
- Linéaire - traitement vidéo(2909)
- Linéaire - comparateurs(5084)
- Multipliseurs analogiques linéaires, séparateurs(263)
- Amplificateurs linéaires - amplis vidéo et modules(1905)
- Linéaire - amplificateurs - titrisation(1856)
- Linear - Amplificateurs - Instrumentation, ampères op, ampères tampons(34236)
- Linéaire - amplificateurs - Audio(4567)
- Interface - lecture et enregistrement vocal(556)
- Interface - Uarts (émetteur récepteur asynchrone universel)(1237)
- Interface - Telecom(4467)
- Interface - spécialisée(4833)
- Interface - Terminators du Signal(333)
- Interface - tampons de signal, répéteurs, séparateurs(1449)
- Interface - sérialiseurs, désérialiseurs(1480)
- Interface - capteur et détecteur Interfaces(1524)
- Interface - Modules(169)
- Modules et interface - Modems - ICs(407)
- Interface - i/o expandeurs(1136)
- -Filtres - Active l’interface(1226)
- Interface - encodeurs, décodeurs, convertisseurs(714)
- Interface - moteurs, récepteurs, émetteurs-récepteurs(20755)
- Interface - synthèse numérique directe (DDS)(117)
- Interface - contrôleurs(3628)
- Interface - CODECs(1676)
- Interface - Commutateurs analogiques, multiplexeurs, démultiplexes(12567)
- Interface - Commutateurs analogiques - usage spécial(2533)
- Intégrée - système sur puce (SoC)(4496)
- Embarqués - PLDs (Programmable Logic Device)(971)
- Embarqués - microprocesseurs(10083)
- Embedded - Microcontrôleurs - spécifique à l'application(2275)
- Embarqués - microcontrôleurs(99285)
- Embedded - microcontrôleur, microprocesseur, modules FPGA(1527)
- Embedded - FPGA (réseau de porte programmable sur le terrain) avec des microcontrôleurs(81)
- Embarqués - FPGA (Field Programmable Gate Array)(27747)
- Embarqués - DSP (Digital Signal Processors)(4081)
- Embedded - CPLDS (dispositifs logiques programmables complexes)(5187)
- Acquisition de données - contrôleurs d'écran tactile(1210)
- Acquisition de données - Convertisseurs numériques à analogiques (DAC)(14419)
- Acquisition de données - potentiomètres numériques(6250)
- Acquisition de données - convertisseurs (ADC)(17776)
- Acquisition de données - Analog Front End (AFE)(787)
- Acquisition de données - ADCS / DACS - Objectif spécial(3043)
- Horloge/calendrier - horloges temps réel(2446)
- Horloge / timing - minuteries et oscillateurs programmables(23469)
- Horloge/calendrier - IC Batteries(4)
- Horloge/calendrier - lignes à retard(1049)
- Horloge / synchronisation - générateurs d'horloge, PLL, synthétiseurs de fréquence(32775)
- Horloge/calendrier - horloge tampons, pilotes(4568)
- Horloge/calendrier - applications spécifiques(8652)
- Effet spécial audio(1564)
Fabricant concerné







-
Produits semi-conducteurs discrets
Produits semi-conducteurs discrets
- Régulation actuelle - Diodes, transistors(1090)
- Transistors - titrisation(226)
- Transistors - Programmable unijonction(48)
- Transistors - TECJ(1558)
- Transistors - IGBT - Single(4799)
- Transistors - IGBT - Modules(63420)
- Transistors - IGBT - tableaux(26)
- Transistors - FET, MOSFET - Single(48330)
- Transistors - FET, MOSFET - RF(4903)
- Transistors - FET, MOSFET - tableaux(6641)
- Transistors - bipolaire (bjt) - simple, pré-biaisé(4539)
- Transistors - bipolaires (BJT) - Single(25800)
- Transistors - bipolaire (BJT) - RF(2087)
- Transistors - bipolaires (bjt) - tableaux, pré-biaisés(2115)
- Transistors - bipolaire (BJT) - tableaux(2310)
- Thyristors - TRIACs(4044)
- Thyristors - SCRs - Modules(3967)
- Thyristors - SCRs(5436)
- Thyristors - DIACs, SIDAC(319)
- Modules de Driver de puissance(1627)
- Diodes - Zener - Single(87483)
- Diodes - Zener - tableaux(2619)
- Diodes - capacité Variable (Varicaps, Varactors)(1200)
- Diodes - RF(2753)
- Diodes - redresseurs - Single(67528)
- Diodes - redresseurs - tableaux(20581)
- Diodes - redresseurs de pont(11700)
Fabricant concerné




-
RF / IF et RFID
RF / IF et RFID
- Cartes du module d'identification abonné (SIM)(77)
- Circulateurs et isolateurs RF(1742)
- RFID, RF accès, surveillance ICs(1550)
- Transpondeurs RFID, étiquettes(747)
- Modules de lecteur RFID(464)
- Kits d'évaluation et de développement RFID, conseils(30)
- Antennes RFID(329)
- RFI et EMI - blindage et d’absorber les matériaux(6444)
- RFI et EMI - Contacts, Fingerstock et joints(7497)
- Émetteurs RF(668)
- Modules RF Transceiver(6900)
- Émetteur-récepteur RF ICs(4169)
- Commutateurs RF(9276)
- Boucliers de RF(16401)
- Récepteurs RF(1998)
- Récepteur RF, émetteur et unités finies de l'émetteur-récepteur(2763)
- Diviseurs/répartiteurs de puissance RF(1223)
- RF Power contrôleur ICs(86)
- Modulateurs RF(710)
- Mélangeurs de RF(2800)
- Modules et RF Misc ICs(3276)
- RF Front-End (LNA + PA)(419)
- Kits d'évaluation et de développement RF, conseils d'administration(747)
- Coupleur directionnel RF(2718)
- Diplexeurs RF(1464)
- Détecteurs de RF(412)
- Démodulateurs de RF(249)
- Antennes RF(12319)
- Amplificateurs RF(19651)
- Balun(1496)
- Atténuateurs(4852)
Fabricant concerné







-
Opto-électronique
Opto-électronique
- Optomécanique(480)
- Appareils d'éclairage(125)
- Diodes laser, modules laser - livraison laser, fibres laser(345)
- Systèmes laser Hene(31)
- Têtes laser Hene(27)
- Afficher les rétro-éclairages(93)
- Éclairage au xénon(387)
- Superposition d’écran tactile(453)
- Voyants du panneau, veilleuses(75729)
- Optique - phosphore distance Source lumineuse(269)
- Optique - réflecteurs(665)
- Optique - conduits de lumière(5384)
- Optique - lentilles(4951)
- LED - entretoises, colonnettes(2718)
- LED - lampe de remplacement(29718)
- LEDS - Indicateurs de la carte de circuit imprimé, tableaux, barres lumineuses, graphiques à barres(9083)
- Produits LED thermique(667)
- Kits d’éclairage LED(64)
- Éclairage à LED - blanc(37580)
- Éclairage à LED - couleur(4728)
- Eclairage LED - épis, moteurs, Modules(28735)
- Indication LED - discret(27601)
- Diodes Laser, Modules(1553)
- Lampes - Lampes à incandescence, néons(311004)
- Lampes - Cold Cathode Fluorescent (CCFL) & UV(164)
- Onduleurs(7728)
- Infrarouge, UV, Visible émetteurs(3871)
- Fiber Optics - Tésmetteurs - Circuit de conduite intégré(4085)
- Fibre optique - émetteurs - discret(350)
- Fibre optique - Modules EMETTEUR-RECEPTEUR(18758)
- Fiber Optics - Commutateurs, multiplexeurs, démultiplexes(1387)
- Fibre optique - récepteurs(695)
- Fibre optique - atténuateurs(654)
- Électroluminescents(102)
- Display, moniteur - contrôleur d’Interface(98)
- Modules d’affichage - Fluorescent sous vide (VFD)(249)
- Afficher les Modules - LED Dot Matrix et Cluster(865)
- Modules d'affichage - caractère LED et numérique(5421)
- Afficher l’image de Modules - LCD, OLED,(4654)
- Modules d'affichage - LCD, caractère OLED et numérique(2202)
- Afficher les lunettes, lentilles(88)
- Adressable, spécialité(458)
Fabricant concerné







-
Capteurs, transducteurs
Capteurs, transducteurs
- Récepteurs ultrasoniques, émetteurs - industriel(115)
- Capteurs de température - Thermostats - Mécanique - Industriel(3103)
- Capteurs de température - Sortie analogique et numérique - industriel(209)
- Capteurs de proximité - industriel(13611)
- Capteurs de pression, transducteurs - industriels(26503)
- Capteurs optiques - Photonics - Compteurs, détecteurs, SPCM (module de comptage de photons unique)(751)
- Capteurs optiques - modules de caméra(875)
- Capteurs magnétiques - position, proximité, vitesse (modules) - industriel(554)
- Capteurs de force - industriel(346)
- Capteurs d'écoulement - industriel(151)
- Float, capteurs de niveau - industriel(310)
- Encodeurs - industriel(4980)
- Capteurs de couleur - industriel(50)
- Capteurs tactiles(100)
- Ultrasons récepteurs, émetteurs(2421)
- Température capteurs - Thermostats - Solid State(1096)
- Température capteurs - Thermostats - mécanique(3397)
- Capteurs de température - thermocouples, sondes de température(1921)
- Capteurs de température - RTD (détecteur de température de résistance)(1525)
- -Capteurs de température THERMISTANCES CTP(2273)
- -Capteurs de température thermistances ctn(13259)
- Capteurs de température - sortie analogique et numérique(3928)
- Jauges de contrainte(1399)
- Capteurs spécialisés(1861)
- Cellules solaires(503)
- Capteurs de choc(84)
- Sensor Interface - blocs de jonction(2519)
- Câble de la sonde - assemblées(22011)
- Détecteurs de proximité/présence - unités finis(725)
- Détecteurs de proximité(2860)
- Capteurs de pression, transducteurs(11317)
- Position des capteurs - Angle, mesure linéaire(6022)
- Capteurs optiques - Réflexion - sortie logique(194)
- Capteurs optiques - Réflexion - sortie analogique(432)
- Capteurs optiques - Phototransistors(1027)
- Capteurs optiques - PhotoInterrupters - Type de fente - sortie du transistor(1427)
- Capteurs optiques - PhotoInterrupters - Type de fente - sortie logique(1215)
- Capteurs optiques - photoélectriques, industriel(16763)
- Capteurs optiques - Photodiodes(1543)
- Capteurs optiques - détecteurs de photos - récepteur distant(2605)
- Capteurs optiques - détecteurs de photos - sortie logique(146)
- Capteurs optiques - détecteurs de photos - cellules CDS(74)
- Capteurs optiques - mesure de Distance(377)
- Capteurs optiques - Lumière ambiante, IR, capteurs UV(1305)
- Multifonction(558)
- Détecteurs de mouvement - Vibration(337)
- Détecteurs de mouvement - commutateurs de Tilt(67)
- Détecteurs de mouvement - optiques(719)
- Détecteurs de mouvement - inclinomètres(175)
- Capteurs de mouvement - Imus (unités de mesure inertielle)(416)
- Détecteurs de mouvement - Gyroscopes(214)
- Détecteurs de mouvement - accéléromètres(1911)
- Aimants - capteur correspondant(119)
- Aimants - Multi usage(1965)
- Capteurs magnétiques - interrupteurs (état solide)(3700)
- Capteurs magnétiques - position, proximité, vitesse (modules)(5199)
- Capteurs magnétiques - Boussole linéaire (ICS)(1247)
- Capteurs magnétiques - Compasse, champ magnétique (modules)(35)
- Transducteurs LVDT (transformateur différentiel variable linéaire)(204)
- Modules d’émetteur/récepteur IrDA(196)
- Capteurs d’image, appareil photo(2235)
- Humidité, capteurs d’humidité(1425)
- Capteurs de gaz(1217)
- Capteurs de force(188)
- Capteurs de débit(550)
- Flotteur, capteurs de niveau(1343)
- Encodeurs(6357)
- Capteurs de poussières(43)
- Transducteurs de courant(3455)
- Capteurs de couleur(85)
- Amplificateurs(1905)
Fabricant concerné







-
Connecteurs, interconnexions
Connecteurs, interconnexions
- Connecteurs USB, DVI, HDMI(446)
- Connecteurs d'éclairage à l'état solide(555)
- Prises de circulation pour ICS, transistors(953)
- Connecteurs enfichables(1221)
- Connecteurs photovoltaïques (panneau solaire)(136)
- Connecteurs à fibre optique(370)
- Connecteurs FFC, FPC (Flat Flexible)(761)
- Connecteurs D-SUB, en forme de D(2887)
- Connecteurs coaxiaux (RF)(2389)
- Connecteurs circulaires(14162)
- Connecteurs d'alimentation de type lame(273)
- Bouchons et récipients(2597)
- USB, DVI, HDMI connecteurs - adaptateurs(572)
- Connecteurs USB, DVI, HDMI(4298)
- Bornes - fil sur les connecteurs de la carte(217)
- Bornes - connecteurs de jonction de câbles(4322)
- Bornes - connecteurs à broches Câble(328)
- Bornes - tourelle connecteurs(1273)
- Bornes - connecteurs spécialisés(2042)
- Bornes - cosses plates(3902)
- Bornes - soudure Lug connecteurs(345)
- Bornes - connecteurs à vis(745)
- Bornes - connecteurs en anneau(12596)
- Bornes - connecteurs rectangulaires(4747)
- Terminaux - Connects rapides, connecteurs de déconnexion rapide(8514)
- Bornes - Pin de PC, un message connecteurs(3776)
- Bornes - PC goupille prises, connecteurs(5883)
- Bornes - connecteurs de fil magnétique(1653)
- Bornes - couteau connecteurs(112)
- Bornes - boîtiers, bottes(2850)
- Bornes - connecteurs aluminium(108)
- Bornes - baril de balle connecteurs(1107)
- Terminaux - adaptateurs(137)
- Borniers et planches de tourelle(1159)
- Systèmes de jonction terminal(2533)
- Blocs de bornes - fil à la carte(43615)
- Blocs de jonction - spécialisées(3722)
- Blocs de jonction - Distribution d’énergie(847)
- Blocs de jonction - montage sur panneau(1359)
- Blocs de jonction - Modules d’Interface(1819)
- Blocs de jonction - Headers, fiches et prises(119920)
- Canal de borniers - sur Rail Din(9373)
- Blocs de jonction - Contacts(65)
- Blocs de jonction - blocs de barrière(47517)
- Blocs de jonction - adaptateurs(1059)
- Solid State Lighting connecteurs - Contacts(271)
- Connecteurs d'éclairage à l'état solide(1344)
- Sockets for ics, transistors - adaptateurs(275)
- Prises de circulation pour ICS, transistors(22148)
- Shunts, cavaliers(907)
- Connecteurs rectangulaires - ressort(7721)
- Connecteurs rectangulaires - boîtiers(43023)
- Connecteurs rectangulaires - en-têtes, broche spécialisée(6129)
- Connecteurs rectangulaires - En-têtes, réceptacles, prises féminines(229601)
- Connecteurs rectangulaires - Headers, Pins mâle(543338)
- Connecteurs rectangulaires - suspension gratuite, support de panneau(30142)
- Connecteurs rectangulaires - Contacts(10681)
- Connecteurs rectangulaires - planche dans, fil direct à la carte(2432)
- Connecteurs rectangulaires - adaptateurs(475)
- Rectangulaire - Connecteurs de bord à bord - En-têtes, réceptacles, prises féminines(9)
- Rectangulaire - Connecteurs de bord à bord - En-têtes, épingles mâles(2)
- Connecteurs rectangulaires - espaceurs de carte, empiètes (planche à bord)(238901)
- Connecteurs rectangulaires - tableaux, type de bord, mezzanine (planche à bord)(37853)
- Connecteurs d'entrée d'alimentation - entrées, prises, modules(10310)
- Connecteurs enfichables(6049)
- Connecteurs photovoltaïques (panneau solaire) - Contacts(77)
- Connecteurs photovoltaïques (panneau solaire)(504)
- Connecteurs modulaires - câblage des blocs(99)
- Connecteurs modulaires - bouchons(1674)
- Connecteurs modulaires - boîtiers de prise(181)
- Connecteurs modulaires - Jacs avec magnétique(10152)
- Connecteurs modulaires - Jacks(23416)
- Connecteurs modulaires - adaptateurs(855)
- Adaptateurs de connecteurs - cartes PC - mémoire(21)
- Connecteurs de mémoire - carte PC Sockets(3299)
- Connecteurs de mémoire - Inline barrettes(3390)
- Connecteurs LGH(764)
- Keystone - Inserts(2758)
- Keystone - façades, cadres(1926)
- Modules de connecteurs - Inserts, Heavy Duty(4190)
- Heavy Duty connecteurs - boîtiers, capots, Bases(17226)
- Heavy Duty connecteurs - images(523)
- Heavy Duty connecteurs - Contacts(1832)
- Heavy Duty connecteurs - assemblées(671)
- Connecteurs de fibres optiques - boîtiers(919)
- Connecteurs fibre optique - Adaptateurs(4455)
- Connecteurs de fibres optiques(3001)
- FFC, FPC (plat Flexible) connecteurs - boîtiers(652)
- FFC, FPC (plat Flexible) connecteurs - Contacts(202)
- Connecteurs FFC, FPC (Flat Flexible)(18691)
- Connecteurs D-Sub, en forme de D - Terminators(47)
- Connecteurs D-Sub, en forme de D - boîtiers(12238)
- Connecteurs D-Sub, en forme de D - Contacts(2714)
- D-SUB, Connecteurs en forme de D - Backshells, Capots(5995)
- Connecteurs D-Sub, en forme de D - adaptateurs(1304)
- Connecteurs Sub-D(141346)
- Raccords en forme de D - Centronics(8770)
- Contacts, ressort et pression(630)
- Contacts - Multi usage(6196)
- Contacts - grille de connexion(122)
- Connecteurs coaxiaux (RF) - Terminators(1231)
- Connecteurs coaxiaux (RF) - Contacts(480)
- Connecteurs coaxiaux (RF) - adaptateurs(6386)
- Connecteurs coaxiaux (RF)(25734)
- Connecteurs circulaires - boîtiers(441226)
- Connecteurs circulaires - Contacts(4737)
- Connecteurs circulaires - Backshells et Cable Blamps(53692)
- Connecteurs circulaires - adaptateurs(8839)
- Connecteurs circulaires(1196254)
- Connecteurs de carte Edge - boîtiers(469)
- Connecteurs de carte Edge - connecteurs Edgeboard(672683)
- Connecteurs bord de carte - Contacts(325)
- Connecteurs bord de carte - cartes(73)
- Connecteurs d'alimentation de type lame - boîtiers(837)
- Connecteurs d'alimentation de type lame - Contacts(393)
- Connecteurs d'alimentation de type lame(4163)
- Entre les adaptateurs série(649)
- Canon - connecteurs d’alimentation(935)
- Canon - connecteurs Audio(2432)
- Canon - adaptateurs Audio(92)
- Banane et pointe connecteurs - Jacks, fiches(1644)
- Connecteurs de banane et de pointe - Postes de liaison(239)
- Banane et pointe de raccords - adaptateurs(75)
- Fond de panier connecteurs - spécialisées(45586)
- Fond de panier connecteurs - boîtiers(6863)
- Connecteurs de plantes arrière - métrique dure, standard(6297)
- Fond de panier connecteurs - DIN 41612(9408)
- Fond de panier connecteurs - Contacts(3583)
- Fond de panier connecteurs - ARINC Inserts(2357)
- Fond de panier connecteurs - ARINC(3789)
Fabricant concerné







-
Résistances
-
Condensateurs
Condensateurs
- Condensateurs électrolytiques en aluminium(16817)
- Coupe-bordures, les condensateurs variables(3151)
- Condensateurs à Film mince(3473)
- Condensateurs au tantale(136103)
- Tantale - condensateurs polymère(9778)
- Condensateurs de silicium(320)
- Condensateurs d’oxyde de niobium(330)
- Mica et condensateurs PTFE(9101)
- Condensateurs à film(150406)
- Condensateurs électriques à double couche (EDLC), supercondensateurs(2782)
- Condensateurs céramiques(833829)
- Réseaux de condensateur, tableaux(2383)
- Condensateurs électrolytiques en aluminium(125325)
- Aluminium - condensateurs polymère(7544)
Fabricant concerné






-
Transformateurs
Transformateurs
Fabricant concerné







-
Isolateurs
-
Cristaux, oscillateurs, résonateurs
-
Commutateurs
Commutateurs
- Interrupteurs de verrouillage(2893)
- Commutateurs d'arrêt d'urgence (e-stop)(1160)
- Interrupteurs à tirette(571)
- Interrupteurs à bascule(33608)
- Commutateurs de molette(742)
- Interrupteurs tactiles(14263)
- Snap Action, fins de course(28077)
- Interrupteurs à coulisse(5166)
- Sélecteurs(9720)
- Roues codeuses(13850)
- Interrupteurs(53790)
- Commutateurs de bouton poussoir - effet Hall(127)
- Commutateurs de bouton poussoir(190826)
- Interrupteurs programmables affichage(39)
- Commutateurs de navigation, Joystick(1882)
- Magnétiques, interrupteurs Reed(1399)
- Commutateurs clavier(637)
- Interrupteurs de verrouillage des touches(3684)
- Commutateurs DIP(7747)
- Switch configurable Components - Lens(1435)
- Composants de commutation configurables - source d'éclairage(1236)
- Switch configurable Components - bloc de Contact(1401)
- Switch configurable Components - corps(16077)
- Déconnectez les composants de l’interrupteur(2567)
Fabricant concerné






-
Relais
Relais
- Relais de sécurité(1310)
- Relais Reed(1735)
- Relais haute fréquence (RF)(1190)
- Contacteurs (état solide)(686)
- Contacteurs (électromécaniques)(11952)
- Relais automobiles(1881)
- Relais à semi-conducteur(10652)
- Relais de signal, jusqu'à 2 ampères(9149)
- Douilles de relais(2075)
- Relais de puissance, plus de 2 ampères(31604)
- Modules de relais d'E / S(712)
- Modules d’e/s relais - entrée(2)
- Grilles de Module d’e/s relais(247)
Fabricant concerné






















Choisir la langue
Langue courante
Français
- English
- Deutsch
- Italia
- Français
- 日本語
- 한국의
- русский
- Svenska
- Nederland
- español
- Português
- polski
- Suomi
- Gaeilge
- Slovenská
- Slovenija
- Čeština
- Melayu
- Magyarország
- Hrvatska
- Dansk
- românesc
- Indonesia
- Ελλάδα
- Български език
- Afrikaans
- IsiXhosa
- isiZulu
- lietuvių
- Maori
- Kongeriket
- Монголулс
- O'zbek
- Tiếng Việt
- हिंदी
- اردو
- Kurdî
- Català
- Bosna
- Euskera
- العربية
- فارسی
- Corsa
- Chicheŵa
- עִבְרִית
- Latviešu
- Hausa
- Беларусь
- አማርኛ
- Republika e Shqipërisë
- Eesti Vabariik
- íslenska
- မြန်မာ
- Македонски
- Lëtzebuergesch
- საქართველო
- Cambodia
- Pilipino
- Azərbaycan
- ພາສາລາວ
- বাংলা ভাষার
- پښتو
- malaɡasʲ
- Кыргыз тили
- Ayiti
- Қазақша
- Samoa
- සිංහල
- ภาษาไทย
- Україна
- Kiswahili
- Cрпски
- Galego
- नेपाली
- Sesotho
- Тоҷикӣ
- Türk dili
- ગુજરાતી
- ಕನ್ನಡkannaḍa
- मराठी
Un guide complet des capteurs à ultrasons: fonction, fonctionnalités et cas d'utilisation
Temps: 2025/04/30
Parcourir: 5,400
Les capteurs à ultrasons sont des outils puissants pour la mesure de la distance sans contact, largement utilisés dans toutes les industries, de la robotique à la sécurité automobile.En émettant des ondes sonores à haute fréquence et en analysant les échos de retour, ces capteurs offrent une solution fiable et abordable pour détecter les objets, même dans des environnements difficiles comme les usines poussiéreuses ou les garages de stationnement encombrés.Dans cet article, nous explorerons comment fonctionnent les capteurs à ultrasons, leurs différents types, les exemples de câblage et de codage pratiques, ainsi que des avantages et des limites clés lors de la conception.

Catalogue
Figure 1. Capteur à ultrasons
Présentation du capteur à ultrasons
Un capteur à ultrasons Mesures la distance En émettant des ondes sonores à haute fréquence et en chronométrant combien de temps il faut pour que les échos reviennent.Cette méthode lui permet de détecter des objets sans aucun contact physique.En règle générale, ces capteurs peuvent identifier 4,5 mètres de distance, les rendant utiles pour les tâches de détection à courte portée et longue distance.Vous pouvez souvent les installer dans la robotique et les véhicules autonomes pour améliorer la détection et la navigation des obstacles.
La largeur d'impulsion du capteur peut être affinée pour affiner la précision à des distances plus étroites.Cependant, le rétrécissement de l'impulsion réduit les performances sur des plages plus longues, créant un compromis entre la précision et la plage de détection maximale.Même avec cette limitation, les capteurs à ultrasons restent populaires car ils offrent une alternative abordable aux technologies de mesure à distance plus coûteuses.Leur rentabilité les rend parfaits pour les projets où les contraintes budgétaires sont un facteur.
Les capteurs à ultrasons sont couramment utilisés dans les systèmes de stationnement pour aider les conducteurs, dans les configurations d'évitement des collisions pour améliorer la sécurité des véhicules, dans les systèmes automatisés qui nécessitent une reconnaissance d'objets et dans les environnements industriels pour rationaliser les processus de production.Contrairement aux capteurs infrarouges (IR), les modèles à ultrasons gèrent des environnements remplis de fumée, de poussière ou de particules en suspension dans l'air de manière plus fiable.Cependant, des températures extrêmement élevées peuvent toujours interférer avec leur fonction.En dehors des paramètres industriels et automobiles, les capteurs à ultrasons sont utilisés dans les applications médicales.Ils sont utilisés pour surveiller les niveaux de liquide, détecter les tumeurs, aider à l'imagerie fœtale et effectuer divers types de scanneurs de corps internes, fournissant des outils de diagnostic non invasifs qui sont à la fois sûrs et efficaces.
Principe de fonctionnement du capteur à ultrasons
Un capteur à ultrasons mesure la distance en envoyant une série d'impulsions sonores haute fréquence et en enregistrant le temps qu'il faut pour que les échos reviennent après avoir atteint un objet.En multipliant le temps de trajet par la vitesse du son et en divisant par deux, le capteur détermine la distance exacte à la cible.Chaque capteur comprend deux composants principaux: un émetteur et un récepteur.L'émetteur, équipé d'un cristal piézoélectrique, génère des ondes ultrasoniques, tandis que le récepteur capture les échos de retour.
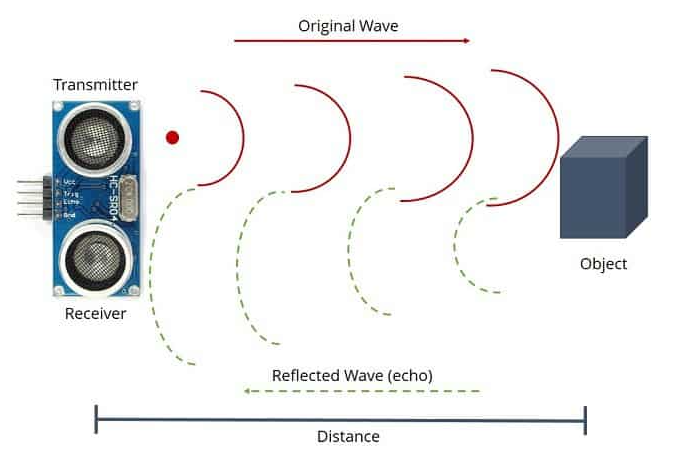
Figure 2. Principe de fonctionnement du capteur à ultrasons
Lorsqu'une mesure commence, l'émetteur émet une explosion étroite d'énergie sonore, créant généralement un motif en forme de cône avec un angle d'environ 30 °.Ces ondes à ultrasons se déplacent plus rapidement que le son audible et se propagent vers l'extérieur.Pour obtenir des lectures précises, la cible doit rester à moins de 15 ° de l'axe central du capteur.Si l'objet se situe en dehors de cette plage, les vagues peuvent détourner la surface de la surface, entraînant des mesures inexactes.
Exemple de fonctionnement pratique: système de stationnement de garage
Dans une configuration de stationnement de garage simple contrôlée par un Arduino, le capteur à ultrasons envoie une impulsion sonore.L'impulsion se déplace dans l'air, frappe le véhicule et se reflète au capteur.En mesurant combien de temps il faut pour que l'écho revienne, le système calcule rapidement la distance à la voiture, aidant le conducteur à éviter les collisions avec des murs ou d'autres obstacles.
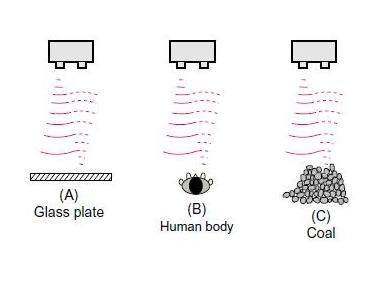
Figure 3. Différentes surfaces reflètent les ondes à ultrasons
Toutes les surfaces ne reflètent pas les ondes à ultrasons de la même manière.
• Lisse, les surfaces plates comme une feuille de plastique ou la surface de l'eau ont tendance à refléter les ondes directement vers le capteur, ce qui entraîne des signaux solides et propres.
• Objets arrondis ou en forme de colonne, comme les bouteilles ou le corps humain, disperser davantage les vagues, ce qui peut affaiblir ou déformer le signal de retour.
• Surfaces rugueuses et granulaires, comme des tas de roches ou du charbon, créent des réflexions imprévisibles, rendant les mesures de distance moins fiables.
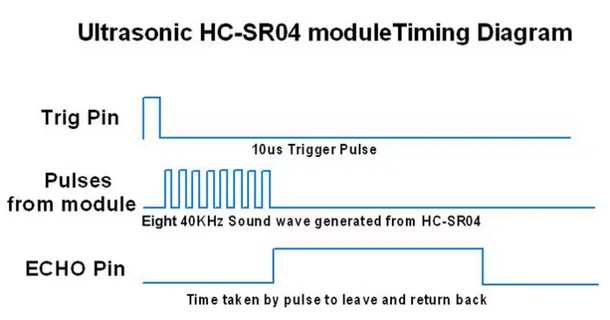
Figure 4. Mesures déclenchées
Pour commencer une mesure de distance, le capteur reçoit d'abord un signal de déclenchement du moins 10 microsecondes.Il émet ensuite une rafale de huit vagues à ultrasons à une fréquence de 40 kHz.Comme ces ondes reflètent les surfaces et le retour, la broche d'écho capture les informations de synchronisation nécessaires pour le calcul de la distance.
Lorsque plusieurs capteurs à ultrasons fonctionnent près les uns des autres, leurs impulsions sonores peuvent se chevaucher, provoquant des interférences du signal et de fausses lectures.Pour éviter cela, les horaires d'impulsion des capteurs doivent être soigneusement synchronisés, garantissant que chaque capteur transmet et reçoit indépendamment sans perturber ses voisins.
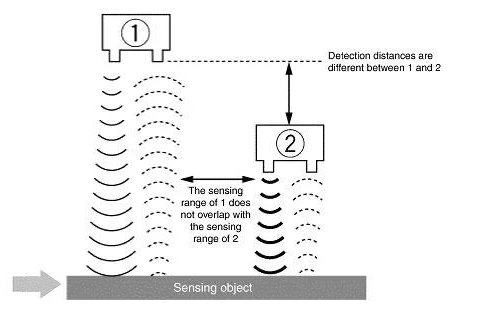
Figure 5. Tempsages d'impulsion des capteurs
Spécifications techniques
|
Paramètre |
Spécification |
|
Tension d'alimentation |
+ 5V |
|
Consommation de courant inactif |
~ 2 mA (mode silencieux) |
|
Consommation active de courant |
~ 15 mA (pendant la mesure) |
|
Plage de mesure |
2 cm à 400 cm |
|
Angle de cône de mesure |
Environ 15 ° |
|
Dimensions du module |
45 mm × 20 mm × 15 mm |
Graphique 1. Spécifications techniques des capteurs à ultrasons
Rôles fonctionnels des capteurs à ultrasons
Les capteurs à ultrasons sont souvent intégrés à des plates-formes de microcontrôleurs telles que Arduino, Raspberry Pi, ARM et Beagleboard.Ces combinaisons permettent aux capteurs de gérer les tâches comme la détection des objets à proximité, la mesure des distances et l'aide aux systèmes d'éviter les collisions.
L'opération de base suit un processus simple.Tout d'abord, le capteur génère une explosion d'ondes sonores ultrasoniques.Ces vagues se déplacent dans l'air jusqu'à ce qu'elles rencontrent un objet et réfléchissent vers le capteur.Le système mesure le temps pris pour que l'écho revienne, et en fonction de ce timing, il calcule la distance à l'objet avec précision.
Connexions de capteurs à ultrasons
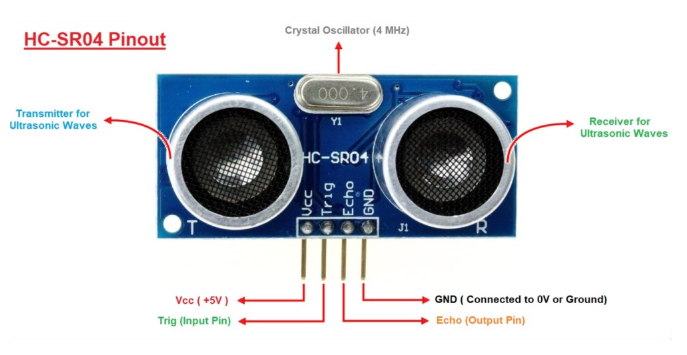
Figure 6. Pinout de capteurs à ultrasons
Un capteur à ultrasons a généralement quatre broches, chacune servant une fonction spécifique.
• Le Broche VCC se connecte à une alimentation + 5V.
• Le Broche Liens vers le sol du système.
• Le Goupille de déclenchement Envoie l'impulsion ultrasonique initiale pour démarrer une mesure.
• Le Épingle d'écho Capture le signal de retour après que l'impulsion se reflète sur un objet.
Le câblage et les connexions prudents sont importants pour s'assurer que le capteur fonctionne de manière fiable, en particulier lors de l'intégration dans un système complexe.
En utilisant plusieurs capteurs à ultrasons dans un système
Lorsque plusieurs capteurs à ultrasons sont placés près les uns des autres, certaines précautions sont nécessaires pour maintenir des lectures précises.Chaque capteur doit être câblé soigneusement pour empêcher ses zones de détection de se chevaucher, ce qui peut provoquer des interférences et de fausses lectures.Il est également important de garder les faces avant des capteurs évidents des obstructions.Tout ce qui bloque le chemin du capteur peut déformer les vagues sortantes ou interférer avec les échos de retour, conduisant à des mesures inexactes.
Connexion d'un capteur à ultrasons à un Arduino
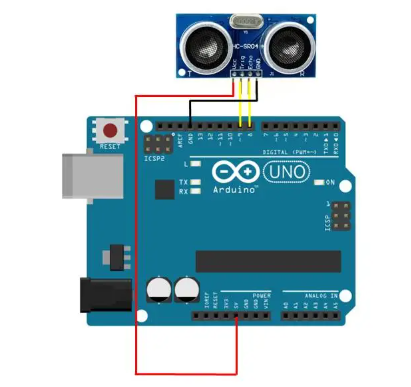
Figure 7. Connexion d'un capteur à ultrasons à un arduino
Pour configurer un système de mesurer à distance à ultrasons, vous aurez besoin de quelques composants de base: une carte Arduino (tout modèle fonctionnera), un capteur à ultrasons HC-SR04 et un ensemble de fils de cavalier pour les connexions.
Câblage du capteur à ultrasons à l'Arduino
Commencez par établir les connexions suivantes:
• Connectez la broche VCC du capteur à la broche 5V de l'Arduino pour fournir de l'énergie.
• Fixez la broche GND du capteur à l'une des épingles de terrain d'Arduino (GND).
• Tirez la broche de déclenchement sur le capteur à la broche numérique 7 sur l'Arduino.
• Tirez la broche d'écho sur le capteur à la broche numérique 6 sur l'Arduino.
Il est important de revérifier ces connexions pour assurer une communication fiable entre le capteur et le microcontrôleur.
Une fois le matériel câblé, l'étape suivante consiste à programmer l'Arduino pour faire fonctionner le capteur.Voici un exemple simple:
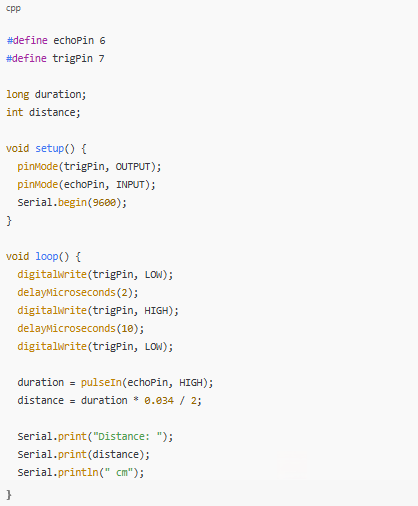
Dans ce code, la broche de déclenchement envoie brièvement un signal élevé pour créer une impulsion à ultrasons.Après avoir envoyé l'impulsion, le code écoute l'écho de retour.Il calcule la distance en fonction de l'heure à laquelle l'impulsion prend pour retourner et affiche le résultat dans les centimètres via le moniteur en série.
Télécharger le code et affichage de la sortie
Pour charger le programme sur l'Arduino:
• Connectez l'Arduino à votre ordinateur à l'aide d'un câble USB.
• Lancez le logiciel Arduino IDE.
• Dans le menu "Outils", sélectionnez "Board" et choisissez le modèle Arduino approprié (comme Arduino Uno).
• Sous "Outils" à nouveau, sélectionnez "port" et choisissez le port où votre Arduino est connecté.
• Cliquez sur le bouton Télécharger pour envoyer le code à la carte.
Une fois que le code télécharge avec succès, ouvrez le moniteur série (trouvé dans le menu "Outils").Vous verrez des mesures de distance immédiates à jour car le capteur détecte les objets à proximité.
Applications de capteurs à ultrasons
Les capteurs à ultrasons sont des outils essentiels dans de nombreuses branches de l'ingénierie, en particulier lorsque une mesure précise et sans contact et la détection d'objets sont nécessaires.Leur capacité à mesurer la distance sans contact physique les rend très polyvalents dans un large éventail d'industries.
• L'une des principales utilisations des capteurs à ultrasons est mesure de la distance.Dans ce rôle, le capteur envoie des ondes sonores qui rebondissent sur les objets et calcule à quelle distance ces objets sont basés sur le temps nécessaire pour que l'écho revienne.Cette capacité est grave dans les systèmes où un espacement précis ou une évaluation de profondeur est nécessaire.
• Dans Systèmes robotiques et automatisés, les capteurs à ultrasons sont fréquemment utilisés pour la détection d'objets.En balayant continuellement leur environnement, ces capteurs aident les machines à reconnaître les obstacles et à ajuster leurs mouvements pour empêcher les collisions.
• Un autre domaine majeur où se trouve les capteurs à ultrasons positionnement et navigation.Les robots et les véhicules autonomes les utilisent pour construire une carte de leur environnement, calculant leurs positions par rapport aux murs, aux barrières et à d'autres objets.Cela permet un mouvement sûr et efficace à travers des espaces complexes.
• Dans paramètres industriels, des capteurs à ultrasons sont utilisés dans surveillance des niveaux de liquide Réserts à l'intérieur et silos.En mesurant la distance entre le capteur et la surface du matériau liquide ou en vrac, ils fournissent un moyen non intrusif de suivre à quel point un conteneur est plein, sans avoir besoin de sondes ou de flotteurs physiques.
• Systèmes de sécurité automobile Comptez également sur des capteurs à ultrasons pour vous aider à éviter les accidents.Ces capteurs détectent les obstacles à proximité et déclenchent des avertissements si un véhicule se rapproche trop de quelque chose, fournissant une assistance grave pendant le stationnement ou des manœuvres à basse vitesse.
• Au-delà de ces utilisations courantes, les capteurs à ultrasons servent dans une variété d'autres applications.Ils sont habitués à Mesurez le diamètre des rouleaux ou des bobines Dans les lignes de fabrication, effectuez des inspections de contrôle de la qualité en vérifiant les défauts de surface ou la précision dimensionnelle, positionnez les bras robotiques avec une haute précision dans les usines automatisées et détectez le mouvement ou l'intrusion dans les systèmes de sécurité et d'alarme.
Types de capteurs à ultrasons
Les capteurs à ultrasons sont disponibles dans une gamme de modèles, chacun optimisé pour des tâches spécifiques.Leurs principes de travail et leurs applications varient en fonction de la façon dont ils envoient, reçoivent et interprètent des ondes sonores.
Capteurs de détection de proximité
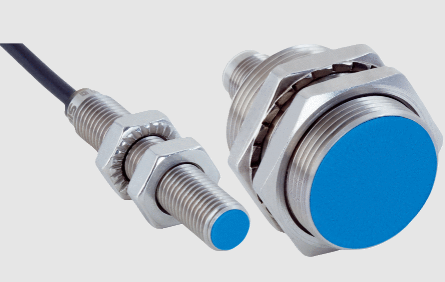
Figure 8. Capteurs de détection de proximité
Ces capteurs se concentrent sur l'identification si un objet est présent dans une plage de jeu, sans calculer la distance exacte.Après avoir émis une explosion d'ondes à ultrasons, ils détectent tout signal de retour qui indique que quelque chose se trouve dans la zone de détection.Les capteurs de proximité sont largement utilisés dans la détection d'obstacles de véhicules, les systèmes de sécurité industrielle et l'automatisation des courroies de tapis roulant.La plupart des modèles offrent un fonctionnement efficace dans les 0 à 2 mètres, bien que certains s'étendent jusqu'à 5 mètres.Leurs principales forces sont une configuration facile, un fonctionnement fiable dans des conditions de faible luminosité et une durabilité car aucune pièce ne touche physiquement la cible.Cependant, leur plage de détection est relativement limitée et les performances peuvent baisser lors de la détection des surfaces douces, poreuses ou très absorbantes.
Chaînes de plages ultrasoniques
Figure 9. Ultrasonic Rangefinders
Contrairement aux capteurs de proximité, les télémètres mesurent la distance exacte à un objet détecté.Ils envoient une impulsion sonore et temps précisément l'Echo de retour pour calculer à quelle distance l'objet est.Ce type de capteur est couramment utilisé en robotique pour la navigation, dans la surveillance au niveau des fluides et sur les véhicules guidés automatisés (AGV).Les distances de travail typiques varient de 20 centimètres à 10 mètres, certains modèles spécialisés atteignant jusqu'à 20 mètres.Les télémètres sont évalués pour leur haute précision et leur capacité à bien performer même dans des environnements difficiles.Cependant, des facteurs tels que la température, l'humidité et le matériau de l'objet détecté peuvent affecter la précision de leurs mesures.
Capteurs à ultrasons à double élément

Figure 10. Capteurs à ultrasons à double élément
Les capteurs à double élément utilisent un émetteur et un récepteur séparés pour améliorer à la fois la sensibilité et la précision.Un composant envoie le signal à ultrasons tandis que l'autre écoute l'onde de retour, améliorant la clarté et réduisant l'interférence du signal.Ces capteurs sont un choix populaire pour détecter les niveaux de liquide, mesurer les débits dans les tuyaux et effectuer des inspections de tests non destructeurs (NDT).Ils opèrent généralement dans une fourchette de 30 centimètres à 5 mètres.Les conceptions à double élévation offrent une meilleure précision de mesure et une plus grande résistance au bruit environnemental, ce qui les rend idéales pour les applications de matériel liquide ou complexes.À la baisse, ils coûtent généralement plus cher et ont des temps de réponse légèrement plus lents par rapport aux conceptions de capteurs plus simples.
Capteurs à ultrasons à faisceau

Figure 11. Capteurs à ultrasons à faisceau
Les capteurs à faisceau se composent d'un émetteur séparé et du récepteur positionné en face de l'autre.Le système envoie en continu un faisceau ultrasonique étroit de l'émetteur au récepteur.Lorsqu'un objet casse ce faisceau, le capteur détecte instantanément l'interruption.Cette méthode est souvent utilisée dans la détection des articles sur les ceintures de convoyeur, les configurations de barrière de sécurité et les systèmes de détection de bord.Les modèles standard couvrent de 0,5 à 10 mètres, avec des unités haut de gamme atteignant jusqu'à 15 mètres.Les capteurs à faisceau excellent à la détection à long terme et sont moins sensibles aux propriétés du matériau des objets détectés.Cependant, ils nécessitent un alignement minutieux lors de l'installation, et le coût de configuration peut être plus élevé en raison de la configuration à double unité.
Capteurs à ultrasons réfléchissants

Figure 12. Capteurs à ultrasons réfléchis
Les capteurs réfléchissants détectent des objets en fonction de la force et de la direction de l'écho de retour.L'émetteur et le récepteur sont logés dans une seule unité, et lorsqu'une onde sonore rebondit d'un objet voisin, le capteur analyse la réflexion pour confirmer la présence de l'objet.Ces capteurs sont largement utilisés pour surveiller les niveaux de remplissage dans les réservoirs, compter les produits sur les lignes de production et la manipulation des tâches dans les environnements d'automatisation industrielle.Leur plage effective se situe généralement entre 5 centimètres et 2 mètres, bien que certains modèles puissent atteindre jusqu'à 4 mètres.Les capteurs à ultrasons réfléchissants sont compacts et fonctionnent de manière fiable à de courtes distances, et leurs performances ne sont pas affectées par la couleur ou la luminosité de la cible.Cependant, la précision de détection peut diminuer si l'objet est fortement incliné loin du capteur.
Différences entre les émetteurs, récepteurs et émetteurs-récepteurs à ultrasons
|
Aspect |
Séparé
Émetteur et récepteur |
Combiné
Émetteur-récepteur |
Complet
Module à ultrasons |
|
Conception |
Composants séparés pour la transmission et
réception |
Un seul appareil gère les deux
et recevoir |
Capteur combiné avec un traitement intégré
électronique |
|
Zone aveugle |
Zone aveugle plus petite (généralement 0 à 20 cm) |
Zone aveugle plus grande (environ 30 cm ou plus;
Modèles plus récents ~ 5 cm) |
Dépend de la conception du module;typiquement
modéré |
|
Sensibilité |
Sensibilité plus élevée;meilleure détection de
signaux faibles |
Sensibilité légèrement réduite par rapport à
Configuration séparée |
Pré-optimisé;peut limiter le réglage fin de
sensibilité |
|
Complexité du circuit |
Nécessite une disposition de circuits plus complexe |
Conception de circuits plus simple;Moins de composants |
Intégration très simple;minimal
Conception de circuit externe nécessaire |
|
Exigence d'espace |
Nécessite plus d'espace PCB pour deux
composants |
Économise de l'espace avec un seul composant |
Économise un espace maximal;solution tout-en-un |
|
Coût |
Modéré (composants individuels) |
Plus élevé si vous utilisez des émetteurs-récepteurs avancés |
Plus haut pour les modules complets |
|
Correspondance de fréquence |
Dangereux;Déliachance> 1 kHz Causes
erreurs de distance |
Non applicable (apparié en interne) |
Non applicable (géré en interne) |
|
Flexibilité de personnalisation |
Haut;peut affiner la fréquence, la puissance,
etc. |
Limité par rapport à la configuration séparée |
Faible;réglage au-delà des paramètres intégrés
Habituellement non possible |
|
Meilleur cas d'utilisation |
Détection de précision à court terme;
conceptions personnalisées |
Conceptions limitées ou simplifiées dans l'espace |
Intégration rapide dans des systèmes plus grands;
Cycles de développement rapide |
Graphique 2. Ultrasonic
Différences d'émetteurs, récepteurs et émetteurs-récepteurs
Pour les avantages et les inconvénients des capteurs à ultrasons
Les capteurs à ultrasons offrent plusieurs avantages clés qui en font un choix fort pour un large éventail d'applications, mais ils sont également livrés avec des limitations qui doivent être prises en compte lors de la conception du système.
Avantages des capteurs à ultrasons
• L'une des plus grandes forces de capteurs à ultrasons est leur cohérence sur différentes surfaces cibles.Contrairement aux capteurs optiques, ils ne reposent pas sur la réflexion de la lumière, ce qui signifie qu'ils peuvent détecter des objets indépendamment de la couleur, de la transparence ou de la finition de surface.Que la cible soit sombre, brillante ou irrégulière, la performance du capteur reste stable.
• Leur plage de mesure est également très flexible.Selon le modèle spécifique, les capteurs à ultrasons peuvent mesurer les distances à partir de quelques centimètres jusqu'à plusieurs mètres, ce qui vous offre des options pour les applications à distance et à longue distance.
• Fiabilité et précision sont des points forts, avec des systèmes ultrasoniques fournissant généralement des résultats reproductibles dans une variété de conditions.Ils peuvent également actualiser les données rapidement, en prenant plusieurs lectures par seconde, ce qui permet des temps de réponse rapides dans des environnements dynamiques comme les véhicules en mouvement ou les lignes de convoyeur.
• Un autre avantage est facilité d'intégration.Les capteurs à ultrasons sont généralement rentables et simples pour se connecter à des microcontrôleurs courants tels que Arduino, Raspberry Pi ou ARM, ce qui les rend accessibles même pour les projets ou prototypes à faible budget.
Inconvénients des capteurs à ultrasons
• Malgré leurs forces, les capteurs à ultrasons ne sont pas sans inconvénients. Facteurs environnementaux tels que la température et l'humidité peuvent influencer considérablement la vitesse du son et ainsi affecter la précision de la mesure.Les systèmes utilisant ces capteurs ont souvent besoin d'étalonnage ou de compensation lorsqu'ils fonctionnent dans de larges plages de température.
• Leur taille physique peut également être une préoccupation.Par rapport à des alternatives plus petites comme les capteurs infrarouges, les dispositifs ultrasoniques sont plus volumineux, ce qui peut limiter leur utilisation dans des conceptions compactes ou limitées dans l'espace.
• La technologie à ultrasons dépend des ondes sonores voyageant à travers un moyen comme l'air, ce qui signifie ces capteurs ne peut pas fonctionner sous vide.Sans un moyen pour porter le son, ils sont rendus complètement inefficaces.
• Enfin, l'état de la surface du capteur joue un rôle important dans Maintenir les performances.La saleté, l'humidité ou l'accumulation de glace sur la face du capteur peuvent absorber ou disperser les ondes à ultrasons, conduisant à des mesures dégradées ou même à l'échec complet de détecter les cibles.
Conclusion
Les capteurs à ultrasons combinent la précision, l'abordabilité et la polyvalence, ce qui en fait des composants utiles dans les systèmes d'ingénierie modernes.Que ce soit utilisé pour la détection des obstacles, la surveillance du niveau de liquide ou la navigation robotique, leur capacité à fournir des mesures précises et sans contact à travers des surfaces et conditions variées reste un avantage majeur.Bien que les facteurs environnementaux et les limitations physiques doivent être gérés, une intégration et une conception appropriées permettent aux capteurs à ultrasons de améliorer considérablement les performances, la sécurité et l'intelligence des systèmes simples et avancés.
Questions fréquemment posées [FAQ]
1. Comment vérifier si un capteur à ultrasons fonctionne ou non?
Alitez le capteur avec 5V, connectez-le à un microcontrôleur et exécutez un test simple pour pulser le déclencheur et mesurez le rendement de l'écho.Vous pouvez également utiliser un multimètre pour vérifier une impulsion de tension sur la broche d'écho.Agitant votre main à l'avant devrait provoquer des lectures cohérentes;Sinon, le capteur peut être défectueux.Assurez-vous que les têtes de capteur sont propres et découvertes.
2. Quel capteur à ultrasons peut détecter?
Un capteur à ultrasons détecte des objets solides comme les murs, les personnes, les meubles et les surfaces d'eau calme en reflétant des ondes sonores.Les surfaces dures et lisses reflètent mieux, tandis que les surfaces douces ou inclinées peuvent affaiblir la détection.Il lutte avec de petits objets, du tissu ou de l'eau rugueuse.
3. Combien de mètres un capteur à ultrasons peut-il détecter?
Les capteurs à ultrasons standard détectent jusqu'à 4 à 5 mètres dans des conditions idéales.Les modèles industriels peuvent atteindre 10 à 20 mètres.En pratique, la plage tombe en chute si l'objet est petit, doux, incliné ou si l'environnement est bruyant.
4. Quelle est la durée de vie d'un capteur à ultrasons?
Les capteurs à ultrasons durent généralement 5 à 10 ans à l'intérieur.Dans des conditions extérieures difficiles, la durée de vie tombe à 2 à 5 ans.Garder le capteur propre et protégé de la poussière et de l'humidité aide à prolonger sa durée de vie.
5. Un capteur à ultrasons a-t-il besoin de lumière?
Non, les capteurs à ultrasons n'ont pas besoin de lumière.Ils travaillent avec des ondes sonores et peuvent fonctionner dans l'obscurité, le brouillard ou la fumée totale sans aucun problème.Seules les conditions de l'air comme la température et l'humidité affectent légèrement les performances.
Article connexe
-
![Comment inverser un moteur à courant direct (DC)?]() Apr 30 2025Comment inverser un moteur à courant direct (DC)?
Apr 30 2025Comment inverser un moteur à courant direct (DC)?Les moteurs DC sont utilisés dans de nombreuses machines de tous les jours, des voitures jouets et des ventilateurs aux outils électriques et aux po... -
![Puissance monophasée vs triphasé: laquelle devez-vous choisir?]() Apr 29 2025Puissance monophasée vs triphasé: laquelle devez-vous choisir?
Apr 29 2025Puissance monophasée vs triphasé: laquelle devez-vous choisir?Comprendre la différence entre les moteurs monophasés et triphasés peut vous aider à choisir le bon pour votre situation.Les moteurs monophasés s...


Produits connexes

GRM0336S1E7R7DD01D
CAP CER 7.7PF 25V S2H 0201

STM32F469AIH6
IC MCU 32BIT 2MB FLASH 169UFBGA

SN74AHC32QPWRQ1
IC GATE OR 4CH 2-INP 14TSSOP

BR24S128FVT-WE2
IC EEPROM 128KBIT I2C 8TSSOPB

CMD11-21VGC/TR8
LED GREEN CLEAR 1206 SMD

UC3875QP
IC OFFLINE SW FULL-BRDG 28PLCC

VE-26J-CY
DC DC CONVERTER 36V 50W

RC0603FR-075K36L
RES SMD 5.36K OHM 1% 1/10W 0603

CRF2512-FX-R005ELF
RES 0.005 OHM 1% 2W 2512

RT0402BRD07105RL
RES SMD 105 OHM 0.1% 1/16W 0402

SKM50GB178D
IGBT Modules
DG413CUE
DG413CUE MAXIM

K4H280438B-TCA2
K4H280438B-TCA2 SAMSUNG