toutes catégories
-
Circuits intégrés (ci)
Circuits intégrés (ci)
- Interface - Capteur, tactile capacitif(642)
- ICs spécialisés(12302)
- PMIC - régulateurs de tension - titrisation(5644)
- PMIC - régulateurs de tension - contrôleurs de régulateur linéaire(793)
- PMIC - régulateurs de tension - Linear + commutation(1829)
- PMIC - régulateurs de tension - linéaire(70981)
- PMIC - régulateurs de tension - régulateurs de commutation CC CC DC(39569)
- PMIC - régulateurs de tension - contrôleurs de commutation CC CC(13507)
- PMIC - référence de tension(9453)
- PMIC - V/F et F/V convertisseurs(145)
- PMIC - gestion thermique(592)
- PMIC - superviseurs(47946)
- PMIC - RMS pour convertisseurs DC(170)
- PMIC - Contrôleurs d'alimentation, moniteurs(2104)
- PMIC - Power Over Ethernet (PoE) contrôleurs(1008)
- PMIC - Gestion de l'alimentation - spécialisée(7722)
- PMIC - Commutateurs de distribution d'alimentation, conducteurs de chargement(7706)
- PMIC - PFC (Power Factor Correction)(1222)
- PMIC - ou contrôleurs, Diodes idéales(705)
- PMIC - chauffeurs, contrôleurs(4712)
- PMIC - éclairage, contrôleurs de Ballast(560)
- PMIC - LED Drivers(7282)
- PMIC - Laser pilotes(573)
- PMIC - contrôleurs permutable à chaud(2816)
- PMIC - Gate pilotes(7083)
- PMIC - pilotes complets, demi-pont(1342)
- PMIC - comptage d’énergie(654)
- PMIC - pilotes d’affichage(1435)
- PMIC - règlement/gestion actuelle(1481)
- PMIC - gestion de la batterie(5553)
- PMIC - chargeurs de batterie(3831)
- PMIC - Convertisseurs CC AC, commutateurs hors ligne(4905)
- Mémoire - contrôleurs(358)
- Mémoire - Configuration Proms pour FPGA(639)
- Mémoire - Batteries(13)
- Mémoire(65694)
- Logique - fonctions de Bus universel(706)
- Logique - traducteurs, Shifters niveau(2854)
- Logique - logique de spécialité(1870)
- Logique - commutateurs de signal, multiplexeurs, décodeurs(9420)
- Logique - registres à décalage(2665)
- Logique - générateurs de parité et vérificateurs(335)
- Logique - multivibrateurs(831)
- Logique - loquets(3658)
- Logique - portes et onduleurs - multifonction, configurable(1687)
- Logique - Gates et onduleurs(16453)
- Logique - tongs(7780)
- Logique - mémoire FIFO(4240)
- Logique - compteurs, diviseurs(3456)
- Logique - comparateurs(592)
- Logique - tampons, chauffeurs, récepteurs, émetteurs-récepteurs(17835)
- Linéaire - traitement vidéo(2909)
- Linéaire - comparateurs(5084)
- Multipliseurs analogiques linéaires, séparateurs(263)
- Amplificateurs linéaires - amplis vidéo et modules(1905)
- Linéaire - amplificateurs - titrisation(1856)
- Linear - Amplificateurs - Instrumentation, ampères op, ampères tampons(34236)
- Linéaire - amplificateurs - Audio(4567)
- Interface - lecture et enregistrement vocal(556)
- Interface - Uarts (émetteur récepteur asynchrone universel)(1237)
- Interface - Telecom(4467)
- Interface - spécialisée(4833)
- Interface - Terminators du Signal(333)
- Interface - tampons de signal, répéteurs, séparateurs(1449)
- Interface - sérialiseurs, désérialiseurs(1480)
- Interface - capteur et détecteur Interfaces(1524)
- Interface - Modules(169)
- Modules et interface - Modems - ICs(407)
- Interface - i/o expandeurs(1136)
- -Filtres - Active l’interface(1226)
- Interface - encodeurs, décodeurs, convertisseurs(714)
- Interface - moteurs, récepteurs, émetteurs-récepteurs(20755)
- Interface - synthèse numérique directe (DDS)(117)
- Interface - contrôleurs(3628)
- Interface - CODECs(1676)
- Interface - Commutateurs analogiques, multiplexeurs, démultiplexes(12567)
- Interface - Commutateurs analogiques - usage spécial(2533)
- Intégrée - système sur puce (SoC)(4496)
- Embarqués - PLDs (Programmable Logic Device)(971)
- Embarqués - microprocesseurs(10083)
- Embedded - Microcontrôleurs - spécifique à l'application(2275)
- Embarqués - microcontrôleurs(99285)
- Embedded - microcontrôleur, microprocesseur, modules FPGA(1527)
- Embedded - FPGA (réseau de porte programmable sur le terrain) avec des microcontrôleurs(81)
- Embarqués - FPGA (Field Programmable Gate Array)(27747)
- Embarqués - DSP (Digital Signal Processors)(4081)
- Embedded - CPLDS (dispositifs logiques programmables complexes)(5187)
- Acquisition de données - contrôleurs d'écran tactile(1210)
- Acquisition de données - Convertisseurs numériques à analogiques (DAC)(14419)
- Acquisition de données - potentiomètres numériques(6250)
- Acquisition de données - convertisseurs (ADC)(17776)
- Acquisition de données - Analog Front End (AFE)(787)
- Acquisition de données - ADCS / DACS - Objectif spécial(3043)
- Horloge/calendrier - horloges temps réel(2446)
- Horloge / timing - minuteries et oscillateurs programmables(23469)
- Horloge/calendrier - IC Batteries(4)
- Horloge/calendrier - lignes à retard(1049)
- Horloge / synchronisation - générateurs d'horloge, PLL, synthétiseurs de fréquence(32775)
- Horloge/calendrier - horloge tampons, pilotes(4568)
- Horloge/calendrier - applications spécifiques(8652)
- Effet spécial audio(1564)
Fabricant concerné







-
Produits semi-conducteurs discrets
Produits semi-conducteurs discrets
- Régulation actuelle - Diodes, transistors(1090)
- Transistors - titrisation(226)
- Transistors - Programmable unijonction(48)
- Transistors - TECJ(1558)
- Transistors - IGBT - Single(4799)
- Transistors - IGBT - Modules(63420)
- Transistors - IGBT - tableaux(26)
- Transistors - FET, MOSFET - Single(48330)
- Transistors - FET, MOSFET - RF(4903)
- Transistors - FET, MOSFET - tableaux(6641)
- Transistors - bipolaire (bjt) - simple, pré-biaisé(4539)
- Transistors - bipolaires (BJT) - Single(25800)
- Transistors - bipolaire (BJT) - RF(2087)
- Transistors - bipolaires (bjt) - tableaux, pré-biaisés(2115)
- Transistors - bipolaire (BJT) - tableaux(2310)
- Thyristors - TRIACs(4044)
- Thyristors - SCRs - Modules(3967)
- Thyristors - SCRs(5436)
- Thyristors - DIACs, SIDAC(319)
- Modules de Driver de puissance(1627)
- Diodes - Zener - Single(87483)
- Diodes - Zener - tableaux(2619)
- Diodes - capacité Variable (Varicaps, Varactors)(1200)
- Diodes - RF(2753)
- Diodes - redresseurs - Single(67528)
- Diodes - redresseurs - tableaux(20581)
- Diodes - redresseurs de pont(11700)
Fabricant concerné




-
RF / IF et RFID
RF / IF et RFID
- Cartes du module d'identification abonné (SIM)(77)
- Circulateurs et isolateurs RF(1742)
- RFID, RF accès, surveillance ICs(1550)
- Transpondeurs RFID, étiquettes(747)
- Modules de lecteur RFID(464)
- Kits d'évaluation et de développement RFID, conseils(30)
- Antennes RFID(329)
- RFI et EMI - blindage et d’absorber les matériaux(6444)
- RFI et EMI - Contacts, Fingerstock et joints(7497)
- Émetteurs RF(668)
- Modules RF Transceiver(6900)
- Émetteur-récepteur RF ICs(4169)
- Commutateurs RF(9276)
- Boucliers de RF(16401)
- Récepteurs RF(1998)
- Récepteur RF, émetteur et unités finies de l'émetteur-récepteur(2763)
- Diviseurs/répartiteurs de puissance RF(1223)
- RF Power contrôleur ICs(86)
- Modulateurs RF(710)
- Mélangeurs de RF(2800)
- Modules et RF Misc ICs(3276)
- RF Front-End (LNA + PA)(419)
- Kits d'évaluation et de développement RF, conseils d'administration(747)
- Coupleur directionnel RF(2718)
- Diplexeurs RF(1464)
- Détecteurs de RF(412)
- Démodulateurs de RF(249)
- Antennes RF(12319)
- Amplificateurs RF(19651)
- Balun(1496)
- Atténuateurs(4852)
Fabricant concerné







-
Opto-électronique
Opto-électronique
- Optomécanique(480)
- Appareils d'éclairage(125)
- Diodes laser, modules laser - livraison laser, fibres laser(345)
- Systèmes laser Hene(31)
- Têtes laser Hene(27)
- Afficher les rétro-éclairages(93)
- Éclairage au xénon(387)
- Superposition d’écran tactile(453)
- Voyants du panneau, veilleuses(75729)
- Optique - phosphore distance Source lumineuse(269)
- Optique - réflecteurs(665)
- Optique - conduits de lumière(5384)
- Optique - lentilles(4951)
- LED - entretoises, colonnettes(2718)
- LED - lampe de remplacement(29718)
- LEDS - Indicateurs de la carte de circuit imprimé, tableaux, barres lumineuses, graphiques à barres(9083)
- Produits LED thermique(667)
- Kits d’éclairage LED(64)
- Éclairage à LED - blanc(37580)
- Éclairage à LED - couleur(4728)
- Eclairage LED - épis, moteurs, Modules(28735)
- Indication LED - discret(27601)
- Diodes Laser, Modules(1553)
- Lampes - Lampes à incandescence, néons(311004)
- Lampes - Cold Cathode Fluorescent (CCFL) & UV(164)
- Onduleurs(7728)
- Infrarouge, UV, Visible émetteurs(3871)
- Fiber Optics - Tésmetteurs - Circuit de conduite intégré(4085)
- Fibre optique - émetteurs - discret(350)
- Fibre optique - Modules EMETTEUR-RECEPTEUR(18758)
- Fiber Optics - Commutateurs, multiplexeurs, démultiplexes(1387)
- Fibre optique - récepteurs(695)
- Fibre optique - atténuateurs(654)
- Électroluminescents(102)
- Display, moniteur - contrôleur d’Interface(98)
- Modules d’affichage - Fluorescent sous vide (VFD)(249)
- Afficher les Modules - LED Dot Matrix et Cluster(865)
- Modules d'affichage - caractère LED et numérique(5421)
- Afficher l’image de Modules - LCD, OLED,(4654)
- Modules d'affichage - LCD, caractère OLED et numérique(2202)
- Afficher les lunettes, lentilles(88)
- Adressable, spécialité(458)
Fabricant concerné







-
Capteurs, transducteurs
Capteurs, transducteurs
- Récepteurs ultrasoniques, émetteurs - industriel(115)
- Capteurs de température - Thermostats - Mécanique - Industriel(3103)
- Capteurs de température - Sortie analogique et numérique - industriel(209)
- Capteurs de proximité - industriel(13611)
- Capteurs de pression, transducteurs - industriels(26503)
- Capteurs optiques - Photonics - Compteurs, détecteurs, SPCM (module de comptage de photons unique)(751)
- Capteurs optiques - modules de caméra(875)
- Capteurs magnétiques - position, proximité, vitesse (modules) - industriel(554)
- Capteurs de force - industriel(346)
- Capteurs d'écoulement - industriel(151)
- Float, capteurs de niveau - industriel(310)
- Encodeurs - industriel(4980)
- Capteurs de couleur - industriel(50)
- Capteurs tactiles(100)
- Ultrasons récepteurs, émetteurs(2421)
- Température capteurs - Thermostats - Solid State(1096)
- Température capteurs - Thermostats - mécanique(3397)
- Capteurs de température - thermocouples, sondes de température(1921)
- Capteurs de température - RTD (détecteur de température de résistance)(1525)
- -Capteurs de température THERMISTANCES CTP(2273)
- -Capteurs de température thermistances ctn(13259)
- Capteurs de température - sortie analogique et numérique(3928)
- Jauges de contrainte(1399)
- Capteurs spécialisés(1861)
- Cellules solaires(503)
- Capteurs de choc(84)
- Sensor Interface - blocs de jonction(2519)
- Câble de la sonde - assemblées(22011)
- Détecteurs de proximité/présence - unités finis(725)
- Détecteurs de proximité(2860)
- Capteurs de pression, transducteurs(11317)
- Position des capteurs - Angle, mesure linéaire(6022)
- Capteurs optiques - Réflexion - sortie logique(194)
- Capteurs optiques - Réflexion - sortie analogique(432)
- Capteurs optiques - Phototransistors(1027)
- Capteurs optiques - PhotoInterrupters - Type de fente - sortie du transistor(1427)
- Capteurs optiques - PhotoInterrupters - Type de fente - sortie logique(1215)
- Capteurs optiques - photoélectriques, industriel(16763)
- Capteurs optiques - Photodiodes(1543)
- Capteurs optiques - détecteurs de photos - récepteur distant(2605)
- Capteurs optiques - détecteurs de photos - sortie logique(146)
- Capteurs optiques - détecteurs de photos - cellules CDS(74)
- Capteurs optiques - mesure de Distance(377)
- Capteurs optiques - Lumière ambiante, IR, capteurs UV(1305)
- Multifonction(558)
- Détecteurs de mouvement - Vibration(337)
- Détecteurs de mouvement - commutateurs de Tilt(67)
- Détecteurs de mouvement - optiques(719)
- Détecteurs de mouvement - inclinomètres(175)
- Capteurs de mouvement - Imus (unités de mesure inertielle)(416)
- Détecteurs de mouvement - Gyroscopes(214)
- Détecteurs de mouvement - accéléromètres(1911)
- Aimants - capteur correspondant(119)
- Aimants - Multi usage(1965)
- Capteurs magnétiques - interrupteurs (état solide)(3700)
- Capteurs magnétiques - position, proximité, vitesse (modules)(5199)
- Capteurs magnétiques - Boussole linéaire (ICS)(1247)
- Capteurs magnétiques - Compasse, champ magnétique (modules)(35)
- Transducteurs LVDT (transformateur différentiel variable linéaire)(204)
- Modules d’émetteur/récepteur IrDA(196)
- Capteurs d’image, appareil photo(2235)
- Humidité, capteurs d’humidité(1425)
- Capteurs de gaz(1217)
- Capteurs de force(188)
- Capteurs de débit(550)
- Flotteur, capteurs de niveau(1343)
- Encodeurs(6357)
- Capteurs de poussières(43)
- Transducteurs de courant(3455)
- Capteurs de couleur(85)
- Amplificateurs(1905)
Fabricant concerné







-
Connecteurs, interconnexions
Connecteurs, interconnexions
- Connecteurs USB, DVI, HDMI(446)
- Connecteurs d'éclairage à l'état solide(555)
- Prises de circulation pour ICS, transistors(953)
- Connecteurs enfichables(1221)
- Connecteurs photovoltaïques (panneau solaire)(136)
- Connecteurs à fibre optique(370)
- Connecteurs FFC, FPC (Flat Flexible)(761)
- Connecteurs D-SUB, en forme de D(2887)
- Connecteurs coaxiaux (RF)(2389)
- Connecteurs circulaires(14162)
- Connecteurs d'alimentation de type lame(273)
- Bouchons et récipients(2597)
- USB, DVI, HDMI connecteurs - adaptateurs(572)
- Connecteurs USB, DVI, HDMI(4298)
- Bornes - fil sur les connecteurs de la carte(217)
- Bornes - connecteurs de jonction de câbles(4322)
- Bornes - connecteurs à broches Câble(328)
- Bornes - tourelle connecteurs(1273)
- Bornes - connecteurs spécialisés(2042)
- Bornes - cosses plates(3902)
- Bornes - soudure Lug connecteurs(345)
- Bornes - connecteurs à vis(745)
- Bornes - connecteurs en anneau(12596)
- Bornes - connecteurs rectangulaires(4747)
- Terminaux - Connects rapides, connecteurs de déconnexion rapide(8514)
- Bornes - Pin de PC, un message connecteurs(3776)
- Bornes - PC goupille prises, connecteurs(5883)
- Bornes - connecteurs de fil magnétique(1653)
- Bornes - couteau connecteurs(112)
- Bornes - boîtiers, bottes(2850)
- Bornes - connecteurs aluminium(108)
- Bornes - baril de balle connecteurs(1107)
- Terminaux - adaptateurs(137)
- Borniers et planches de tourelle(1159)
- Systèmes de jonction terminal(2533)
- Blocs de bornes - fil à la carte(43615)
- Blocs de jonction - spécialisées(3722)
- Blocs de jonction - Distribution d’énergie(847)
- Blocs de jonction - montage sur panneau(1359)
- Blocs de jonction - Modules d’Interface(1819)
- Blocs de jonction - Headers, fiches et prises(119920)
- Canal de borniers - sur Rail Din(9373)
- Blocs de jonction - Contacts(65)
- Blocs de jonction - blocs de barrière(47517)
- Blocs de jonction - adaptateurs(1059)
- Solid State Lighting connecteurs - Contacts(271)
- Connecteurs d'éclairage à l'état solide(1344)
- Sockets for ics, transistors - adaptateurs(275)
- Prises de circulation pour ICS, transistors(22148)
- Shunts, cavaliers(907)
- Connecteurs rectangulaires - ressort(7721)
- Connecteurs rectangulaires - boîtiers(43023)
- Connecteurs rectangulaires - en-têtes, broche spécialisée(6129)
- Connecteurs rectangulaires - En-têtes, réceptacles, prises féminines(229601)
- Connecteurs rectangulaires - Headers, Pins mâle(543338)
- Connecteurs rectangulaires - suspension gratuite, support de panneau(30142)
- Connecteurs rectangulaires - Contacts(10681)
- Connecteurs rectangulaires - planche dans, fil direct à la carte(2432)
- Connecteurs rectangulaires - adaptateurs(475)
- Rectangulaire - Connecteurs de bord à bord - En-têtes, réceptacles, prises féminines(9)
- Rectangulaire - Connecteurs de bord à bord - En-têtes, épingles mâles(2)
- Connecteurs rectangulaires - espaceurs de carte, empiètes (planche à bord)(238901)
- Connecteurs rectangulaires - tableaux, type de bord, mezzanine (planche à bord)(37853)
- Connecteurs d'entrée d'alimentation - entrées, prises, modules(10310)
- Connecteurs enfichables(6049)
- Connecteurs photovoltaïques (panneau solaire) - Contacts(77)
- Connecteurs photovoltaïques (panneau solaire)(504)
- Connecteurs modulaires - câblage des blocs(99)
- Connecteurs modulaires - bouchons(1674)
- Connecteurs modulaires - boîtiers de prise(181)
- Connecteurs modulaires - Jacs avec magnétique(10152)
- Connecteurs modulaires - Jacks(23416)
- Connecteurs modulaires - adaptateurs(855)
- Adaptateurs de connecteurs - cartes PC - mémoire(21)
- Connecteurs de mémoire - carte PC Sockets(3299)
- Connecteurs de mémoire - Inline barrettes(3390)
- Connecteurs LGH(764)
- Keystone - Inserts(2758)
- Keystone - façades, cadres(1926)
- Modules de connecteurs - Inserts, Heavy Duty(4190)
- Heavy Duty connecteurs - boîtiers, capots, Bases(17226)
- Heavy Duty connecteurs - images(523)
- Heavy Duty connecteurs - Contacts(1832)
- Heavy Duty connecteurs - assemblées(671)
- Connecteurs de fibres optiques - boîtiers(919)
- Connecteurs fibre optique - Adaptateurs(4455)
- Connecteurs de fibres optiques(3001)
- FFC, FPC (plat Flexible) connecteurs - boîtiers(652)
- FFC, FPC (plat Flexible) connecteurs - Contacts(202)
- Connecteurs FFC, FPC (Flat Flexible)(18691)
- Connecteurs D-Sub, en forme de D - Terminators(47)
- Connecteurs D-Sub, en forme de D - boîtiers(12238)
- Connecteurs D-Sub, en forme de D - Contacts(2714)
- D-SUB, Connecteurs en forme de D - Backshells, Capots(5995)
- Connecteurs D-Sub, en forme de D - adaptateurs(1304)
- Connecteurs Sub-D(141346)
- Raccords en forme de D - Centronics(8770)
- Contacts, ressort et pression(630)
- Contacts - Multi usage(6196)
- Contacts - grille de connexion(122)
- Connecteurs coaxiaux (RF) - Terminators(1231)
- Connecteurs coaxiaux (RF) - Contacts(480)
- Connecteurs coaxiaux (RF) - adaptateurs(6386)
- Connecteurs coaxiaux (RF)(25734)
- Connecteurs circulaires - boîtiers(441226)
- Connecteurs circulaires - Contacts(4737)
- Connecteurs circulaires - Backshells et Cable Blamps(53692)
- Connecteurs circulaires - adaptateurs(8839)
- Connecteurs circulaires(1196254)
- Connecteurs de carte Edge - boîtiers(469)
- Connecteurs de carte Edge - connecteurs Edgeboard(672683)
- Connecteurs bord de carte - Contacts(325)
- Connecteurs bord de carte - cartes(73)
- Connecteurs d'alimentation de type lame - boîtiers(837)
- Connecteurs d'alimentation de type lame - Contacts(393)
- Connecteurs d'alimentation de type lame(4163)
- Entre les adaptateurs série(649)
- Canon - connecteurs d’alimentation(935)
- Canon - connecteurs Audio(2432)
- Canon - adaptateurs Audio(92)
- Banane et pointe connecteurs - Jacks, fiches(1644)
- Connecteurs de banane et de pointe - Postes de liaison(239)
- Banane et pointe de raccords - adaptateurs(75)
- Fond de panier connecteurs - spécialisées(45586)
- Fond de panier connecteurs - boîtiers(6863)
- Connecteurs de plantes arrière - métrique dure, standard(6297)
- Fond de panier connecteurs - DIN 41612(9408)
- Fond de panier connecteurs - Contacts(3583)
- Fond de panier connecteurs - ARINC Inserts(2357)
- Fond de panier connecteurs - ARINC(3789)
Fabricant concerné







-
Résistances
-
Condensateurs
Condensateurs
- Condensateurs électrolytiques en aluminium(16817)
- Coupe-bordures, les condensateurs variables(3151)
- Condensateurs à Film mince(3473)
- Condensateurs au tantale(136103)
- Tantale - condensateurs polymère(9778)
- Condensateurs de silicium(320)
- Condensateurs d’oxyde de niobium(330)
- Mica et condensateurs PTFE(9101)
- Condensateurs à film(150406)
- Condensateurs électriques à double couche (EDLC), supercondensateurs(2782)
- Condensateurs céramiques(833829)
- Réseaux de condensateur, tableaux(2383)
- Condensateurs électrolytiques en aluminium(125325)
- Aluminium - condensateurs polymère(7544)
Fabricant concerné






-
Transformateurs
Transformateurs
Fabricant concerné







-
Isolateurs
-
Cristaux, oscillateurs, résonateurs
-
Commutateurs
Commutateurs
- Interrupteurs de verrouillage(2893)
- Commutateurs d'arrêt d'urgence (e-stop)(1160)
- Interrupteurs à tirette(571)
- Interrupteurs à bascule(33608)
- Commutateurs de molette(742)
- Interrupteurs tactiles(14263)
- Snap Action, fins de course(28077)
- Interrupteurs à coulisse(5166)
- Sélecteurs(9720)
- Roues codeuses(13850)
- Interrupteurs(53790)
- Commutateurs de bouton poussoir - effet Hall(127)
- Commutateurs de bouton poussoir(190826)
- Interrupteurs programmables affichage(39)
- Commutateurs de navigation, Joystick(1882)
- Magnétiques, interrupteurs Reed(1399)
- Commutateurs clavier(637)
- Interrupteurs de verrouillage des touches(3684)
- Commutateurs DIP(7747)
- Switch configurable Components - Lens(1435)
- Composants de commutation configurables - source d'éclairage(1236)
- Switch configurable Components - bloc de Contact(1401)
- Switch configurable Components - corps(16077)
- Déconnectez les composants de l’interrupteur(2567)
Fabricant concerné






-
Relais
Relais
- Relais de sécurité(1310)
- Relais Reed(1735)
- Relais haute fréquence (RF)(1190)
- Contacteurs (état solide)(686)
- Contacteurs (électromécaniques)(11952)
- Relais automobiles(1881)
- Relais à semi-conducteur(10652)
- Relais de signal, jusqu'à 2 ampères(9149)
- Douilles de relais(2075)
- Relais de puissance, plus de 2 ampères(31604)
- Modules de relais d'E / S(712)
- Modules d’e/s relais - entrée(2)
- Grilles de Module d’e/s relais(247)
Fabricant concerné






















Choisir la langue
Langue courante
Français
- English
- Deutsch
- Italia
- Français
- 日本語
- 한국의
- русский
- Svenska
- Nederland
- español
- Português
- polski
- Suomi
- Gaeilge
- Slovenská
- Slovenija
- Čeština
- Melayu
- Magyarország
- Hrvatska
- Dansk
- românesc
- Indonesia
- Ελλάδα
- Български език
- Afrikaans
- IsiXhosa
- isiZulu
- lietuvių
- Maori
- Kongeriket
- Монголулс
- O'zbek
- Tiếng Việt
- हिंदी
- اردو
- Kurdî
- Català
- Bosna
- Euskera
- العربية
- فارسی
- Corsa
- Chicheŵa
- עִבְרִית
- Latviešu
- Hausa
- Беларусь
- አማርኛ
- Republika e Shqipërisë
- Eesti Vabariik
- íslenska
- မြန်မာ
- Македонски
- Lëtzebuergesch
- საქართველო
- Cambodia
- Pilipino
- Azərbaycan
- ພາສາລາວ
- বাংলা ভাষার
- پښتو
- malaɡasʲ
- Кыргыз тили
- Ayiti
- Қазақша
- Samoa
- සිංහල
- ภาษาไทย
- Україна
- Kiswahili
- Cрпски
- Galego
- नेपाली
- Sesotho
- Тоҷикӣ
- Türk dili
- ગુજરાતી
- ಕನ್ನಡkannaḍa
- मराठी
Comment fonctionne le DRV8871 pour le contrôle de moteurs à courant continu à balais
Temps: 2026/05/14
Parcourir: 59
Le DRV8871 est un pilote de moteur pour contrôler un moteur CC à balais dans les projets électroniques de petite et moyenne taille.Il est utile lorsque vous avez besoin d'un contrôle de vitesse fluide, d'une rotation avant et arrière et d'une meilleure protection que les anciens modules de commande de moteur.Cet article explique ce qu'est le DRV8871, ses principales caractéristiques, les fonctions des broches, le fonctionnement interne, le processus de câblage, les exemples de contrôle Arduino, les problèmes courants, les comparaisons avec d'autres pilotes de moteur, et plus encore.


Catalogue
Qu'est-ce que le pilote de moteur DRV8871 ?
Le DRV8871 est un circuit intégré de pilote de moteur à courant continu à balais utilisé pour contrôler la vitesse et la direction d'un seul moteur à courant continu.Il utilise une conception en pont en H, de sorte que le moteur peut tourner en avant ou en arrière en fonction des signaux d'entrée d'un microcontrôleur.Le DRV8871 prend en charge le contrôle de vitesse PWM et peut gérer des tensions d'alimentation moteur de 6,5 V à 45 V.Le DRV8871 comprend également des fonctions de régulation et de protection du courant, aidant à protéger le moteur et le pilote lors de conditions de démarrage, de surcharge ou de décrochage.
Caractéristiques du DRV8871
• Pilote de moteur à pont en H – Contrôle un moteur à courant continu à balais avec capacité de rotation avant et arrière.
• Large plage de tension de fonctionnement (6,5 V à 45 V) – Prend en charge les applications de moteurs basse et haute tension.
• Entraînement à courant de pointe de 3,6 A – Gère les demandes élevées de courant de démarrage et transitoire du moteur.
• Sortie MOSFET RDS (on) faible – Réduit les pertes de puissance et la génération de chaleur pendant le fonctionnement.
• Contrôle de vitesse PWM – Permet un réglage fluide de la vitesse du moteur à l’aide des signaux PWM provenant d’un microcontrôleur.
• Régulation actuelle sans résistance de détection – Utilise la détection de courant interne pour simplifier la conception des circuits.
• Mode veille basse consommation – Minimise la consommation d'énergie lorsque le moteur est inactif.
• Ensemble HSOP compact – Un petit boîtier à 8 broches permet d'économiser de l'espace sur le circuit imprimé dans des conceptions compactes.
• Verrouillage en cas de sous-tension (UVLO) – Protège le pilote lorsque la tension d'alimentation devient trop faible.
• Protection contre les surintensités (OCP) – Empêche un courant excessif d’endommager le pilote ou le moteur.
• Arrêt thermique (TSD) – Désactive automatiquement le pilote en cas de surchauffe.
• Récupération automatique des pannes – Rétablit le fonctionnement normal une fois les conditions de défaut supprimées.
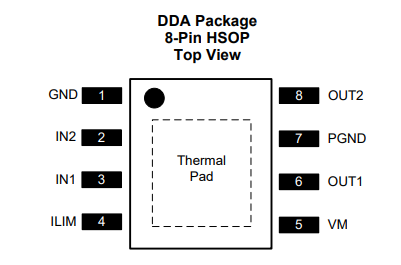
Fonctions de brochage et de broche DRV8871
|
Épingle |
Nom |
Fonction |
|
1 |
GND |
Sol
connexion pour les circuits logiques et de contrôle. |
|
2 |
IN2 |
Entrée logique utilisée
pour contrôler la direction du moteur et le fonctionnement du freinage. |
|
3 |
EN1 |
Entrée logique utilisée
avec IN2 pour la direction du moteur et le contrôle PWM. |
|
4 |
ILIM |
Règle le moteur
limitation de courant à l’aide d’une résistance externe. |
|
5 |
Machine virtuelle |
Puissance du moteur principal
tension d'entrée d'alimentation. |
|
6 |
SORTIE1 |
Sortie moteur
borne connectée à un côté du moteur à courant continu. |
|
7 |
PNDG |
Mise à la terre
connexion pour le chemin de retour du courant moteur. |
|
8 |
SORTIE2 |
Sortie moteur
borne connectée à l’autre côté du moteur à courant continu. |
|
— |
Coussin thermique |
Aide à dissiper
chaleur et améliore les performances thermiques du circuit intégré. |
Comment fonctionne le DRV8871 en interne
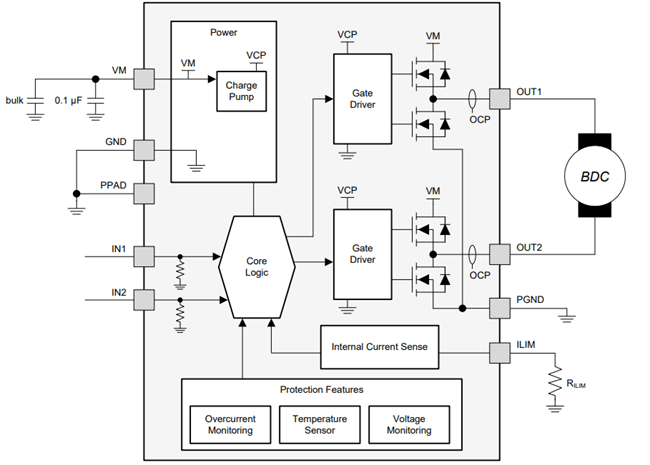
Comme le montre le schéma fonctionnel, le DRV8871 utilise un pont en H interne composé de quatre MOSFET pour contrôler la direction et la vitesse d'un moteur à courant continu à balais.Les entrées logiques IN1 et IN2 contrôlent la façon dont le courant circule à travers le moteur connecté à OUT1 et OUT2, permettant un fonctionnement en mode marche avant, marche arrière, freinage ou roue libre.Les pilotes de grille internes et la pompe de charge aident à commuter efficacement les MOSFET pour le contrôle de la vitesse du moteur PWM.
Le schéma montre également les circuits internes de détection de courant et de protection du DRV8871.La broche ILIM utilise une résistance externe pour définir la limite de courant du moteur, aidant ainsi à réduire le courant de démarrage ou de décrochage excessif.En cas de surcharge, le pilote régule automatiquement le courant via un découpage de courant PWM pour protéger le moteur et l'alimentation.Cela améliore la fiabilité du système et réduit les problèmes de surchauffe dans les applications réelles.
Le DRV8871 comprend également des fonctionnalités de protection intégrées telles que la surveillance des surintensités, la détection de la température et la surveillance de la tension.Si une condition de panne se produit, le conducteur peut s'arrêter temporairement et récupérer automatiquement lorsque les conditions normales reviennent.Dans les applications à faible consommation, l'appareil peut passer en mode veille pour réduire la consommation d'énergie lorsque le moteur ne fonctionne pas.
DRV8871 Régulation de courant et fonctionnement PWM
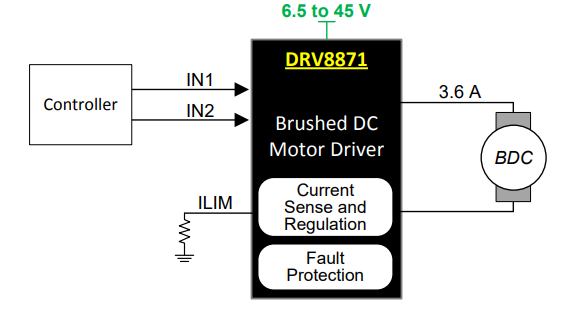
Schéma simplifié, le DRV8871 utilise les entrées de commande IN1 et IN2 pour gérer le fonctionnement du moteur à courant continu à balais.Le pilote comprend une détection de courant interne, une protection contre les défauts et une broche ILIM qui permet d'ajuster la limite de courant du moteur à l'aide d'une résistance externe.Cela permet de protéger le moteur et l’alimentation contre un courant de démarrage ou de décrochage excessif.
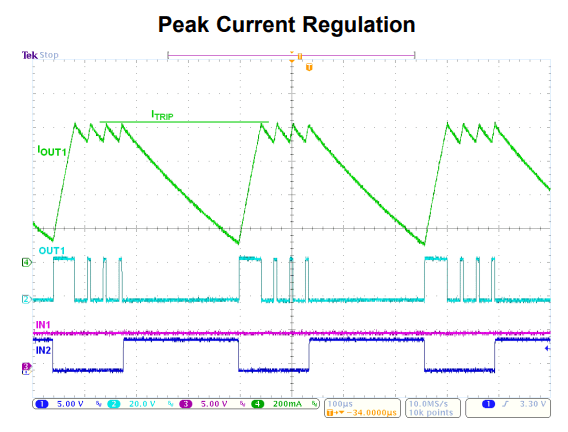
L'image de forme d'onde montre comment le DRV8871 effectue la régulation du courant PWM pendant le fonctionnement.Lorsque le courant du moteur atteint la limite programmée, le pilote utilise automatiquement le découpage du courant PWM pour réduire le courant et maintenir un fonctionnement sûr.La forme d'onde montre également le comportement de décroissance du courant à mesure que le courant du moteur augmente et diminue pendant les cycles de commutation PWM.Cette méthode de régulation améliore la fiabilité du moteur, réduit la surchauffe et permet un contrôle plus fluide du moteur.
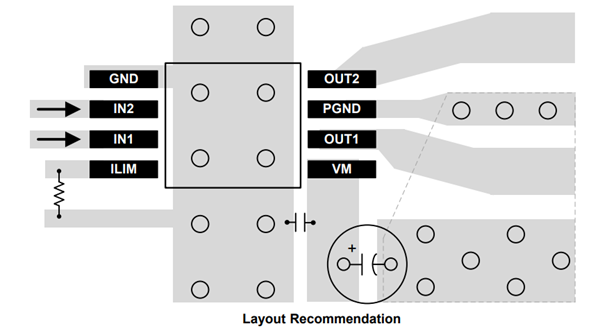
Processus de câblage et de connexion DRV8871
Connexion de base du pilote de moteur DRV8871 avec un Arduino Uno.Les broches de contrôle IN1 et IN2 du DRV8871 sont connectées aux broches numériques Arduino 9 et 10 pour contrôler la direction du moteur et le contrôle de la vitesse PWM.Les masses de l'Arduino et du DRV8871 doivent être connectées ensemble pour établir une référence commune pour la communication des signaux.
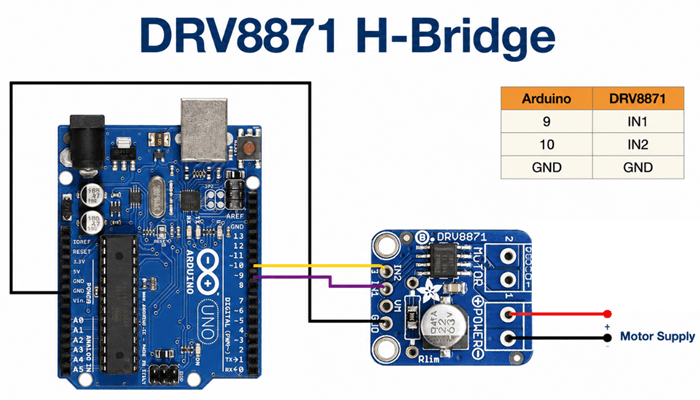
Le moteur à courant continu est connecté aux bornes de sortie moteur du DRV8871, tandis qu'une alimentation externe du moteur est connectée aux bornes d'alimentation VM et GND.L'alimentation du moteur doit correspondre aux exigences de tension du moteur utilisé.Étant donné que les moteurs à courant continu peuvent consommer un courant de démarrage élevé, le moteur ne doit pas être alimenté directement à partir de la broche Arduino 5 V.
Le DRV8871 peut également fonctionner avec les cartes ESP32 car ses entrées logiques sont compatibles avec les signaux de commande PWM des microcontrôleurs modernes.Lors de l'utilisation de l'ESP32, le même principe de connexion s'applique : connectez les broches GPIO compatibles PWM à IN1 et IN2, connectez les masses ensemble et utilisez une alimentation moteur séparée pour l'entrée de tension du moteur.
Pour un fonctionnement stable, il est recommandé de placer des condensateurs en vrac à proximité de l'entrée d'alimentation du VM afin de réduire les chutes de tension et le bruit électrique généré par le moteur.Les composants de protection et un câblage approprié aident à prévenir les réinitialisations aléatoires, le fonctionnement instable du moteur, la surchauffe et les problèmes de communication causés par les pointes de courant du moteur.
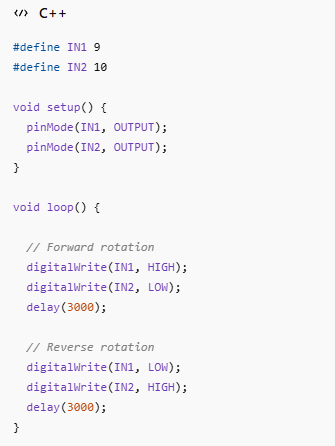
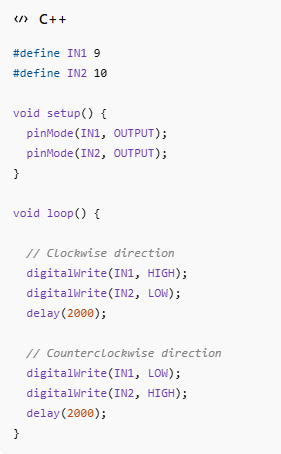
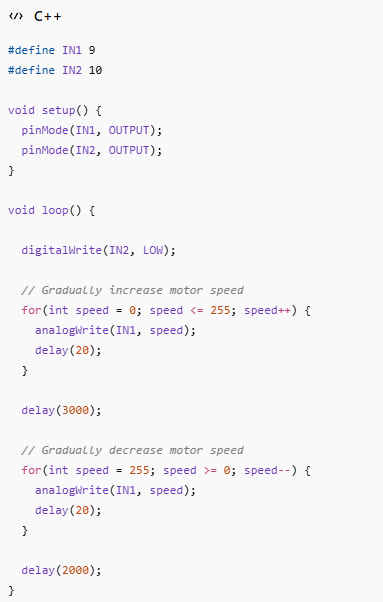
Exemple de code Arduino pour DRV8871
Code de rotation du moteur de base
Exemple de contrôle de vitesse PWM
Exemple de contrôle de direction
Exemple de démarrage progressif utilisant PWM
Problèmes courants et dépannage
|
Problème |
Possible
Parce que |
Dépannage
Solution |
|
Moteur non
filer |
Câblage incorrect
ou pas d'alimentation moteur |
Vérifiez OUT1,
Connexions OUT2, VM et GND et vérifiez la tension d'alimentation du moteur. |
|
DRV8871
surchauffe |
Moteur excessif
refroidissement actuel ou insuffisant |
Réduire le moteur
Charge, baisse de la tension d'alimentation ou amélioration de la dissipation thermique du PCB. |
|
Moteur uniquement
tourne dans un sens |
IN1 ou IN2
problème de signal de commande |
Vérifier Arduino
ou signaux de sortie du microcontrôleur et connexions de câblage. |
|
Le moteur vibre
mais ne tourne pas |
Faible offre
source d'alimentation actuelle ou faible |
Utilisez un
alimentation externe à courant plus élevé pour le moteur. |
|
Arduino se réinitialise
lors du démarrage du moteur |
Chute de tension
causée par les pointes de courant du moteur |
Ajouter du volume
condensateurs à proximité de VM et utilisez des alimentations moteur et logique séparées. |
|
Le conducteur s'arrête
vers le bas de façon inattendue |
Surintensité ou
protection thermique activée |
Vérifier le moteur
conditions de décrochage, courts-circuits ou charge excessive. |
|
Vitesse PWM
le contrôle ne fonctionne pas |
MLI incorrect
configuration du code PIN ou du code |
Assurer
Des broches GPIO compatibles PWM et des paramètres analogWrite() corrects sont utilisés. |
|
Vitesse du moteur
instable |
Bruit électrique
ou une mauvaise mise à la terre |
Améliorer
mise à la terre et raccourcissez le câblage du moteur si possible. |
|
Aucune réponse de
DRV8871 |
Mode veille
problème activé ou logique |
Vérifiez IN1 et
États d’entrée IN2 et vérifiez les connexions d’alimentation. |
|
Le moteur tourne
lentement |
Tension d'alimentation
trop bas |
Utiliser un moteur
tension d'alimentation correspondant aux spécifications du moteur. |
|
Excessif
bruit électrique |
Manquant
condensateurs de filtrage |
Ajoutez un contournement et
condensateurs en vrac à proximité de l’entrée d’alimentation du pilote de moteur. |
|
Fonctionnement court
temps dans les systèmes de batterie |
Moteur élevé
consommation actuelle |
Réduire le moteur
charger ou optimiser les paramètres de contrôle de vitesse PWM. |
DRV8871 vs autres pilotes de moteur
DRV8871 contre L298N
Le DRV8871 et L298N sont tous deux des pilotes de moteur à courant continu à balais utilisés pour la direction et le contrôle de la vitesse du moteur, mais ils sont conçus avec des technologies très différentes.Le L298N utilise des sorties à transistors bipolaires plus anciennes, tandis que le DRV8871 utilise une commutation MOSFET moderne, ce qui rend le DRV8871 plus efficace et capable de produire moins de chaleur pendant le fonctionnement.Les deux pilotes prennent en charge le contrôle du moteur PWM et la rotation bidirectionnelle du moteur, mais le DRV8871 offre une meilleure efficacité énergétique, une régulation de courant intégrée et des fonctionnalités de protection améliorées.
Le DRV8871 est généralement le meilleur choix pour la robotique moderne et les systèmes embarqués car il est plus petit, plus efficace et plus facile à intégrer dans des projets compacts.Le L298N est toujours populaire auprès des débutants en raison de son faible coût et de ses modules faciles à trouver, mais il gaspille plus d'énergie et devient souvent chaud sous charge.Pour les systèmes alimentés par batterie ou les applications à plus haut rendement, le DRV8871 est généralement l'option supérieure.
DRV8871 contre TB6612FNG
Le DRV8871 et TB6612FNG sont tous deux des pilotes de moteur basés sur MOSFET conçus pour un contrôle efficace des moteurs à courant continu avec une génération de chaleur inférieure à celle des pilotes plus anciens comme le L298N.Les deux prennent en charge le contrôle de vitesse PWM et le fonctionnement du moteur avant/arrière, ce qui les rend adaptés à la robotique et aux projets embarqués.Cependant, le TB6612FNG est conçu principalement pour les applications à basse tension, tandis que le DRV8871 prend en charge une plage de tension de fonctionnement beaucoup plus large et une capacité de courant moteur plus élevée.
Le DRV8871 convient mieux aux moteurs de plus grande puissance et aux applications nécessitant une limitation de courant et des fonctions de protection plus solides.En revanche, le TB6612FNG est souvent préféré pour les robots plus petits et les systèmes basse tension compacts, car il peut contrôler deux moteurs sur une seule puce.Si le projet nécessite une gestion de tension plus élevée et une meilleure protection du moteur, le DRV8871 est généralement le meilleur choix.
DRV8871 contre BTS7960
Le DRV8871 et BTS7960 sont tous deux des pilotes de moteur à courant élevé conçus pour le contrôle de moteurs à courant continu à balais, mais ils ciblent différents niveaux de puissance.Le DRV8871 est destiné aux moteurs de moyenne puissance et aux systèmes embarqués compacts, tandis que le BTS7960 est conçu pour les moteurs beaucoup plus gros nécessitant une capacité de courant très élevée.Les deux prennent en charge le contrôle de vitesse PWM et le fonctionnement bidirectionnel du moteur, mais le BTS7960 peut gérer un courant moteur continu nettement plus élevé.
Le DRV8871 convient mieux aux conceptions compactes, aux robots plus petits et aux systèmes nécessitant une régulation et une protection de courant intégrées dans un petit boîtier.Le BTS7960 est plus adapté aux applications lourdes telles que les véhicules électriques, les gros actionneurs et les systèmes de moteurs haute puissance.Pour les moteurs petits à moyens, le DRV8871 est souvent plus facile à utiliser et plus pratique, tandis que le BTS7960 est meilleur pour les charges moteur très exigeantes.
DRV8871 contre DRV8833
Le DRV8871 et DRV8833 sont deux pilotes de moteur développés pour un contrôle efficace des moteurs à courant continu utilisant des étages de sortie MOSFET.Les deux prennent en charge le contrôle PWM, la faible génération de chaleur et les fonctions de protection intégrées.Cependant, le DRV8833 est optimisé pour les appareils portables basse tension, tandis que le DRV8871 prend en charge des tensions d'alimentation moteur beaucoup plus élevées et une capacité de courant moteur plus élevée.
Le DRV8871 est généralement meilleur pour les applications industrielles, automobiles et de moteurs à haute tension en raison de sa plage de fonctionnement plus large et de sa gestion du courant plus élevée.Le DRV8833 est plus adapté aux petits robots alimentés par batterie, aux appareils électroniques portables et aux systèmes basse tension pour lesquels la taille compacte et la faible consommation d'énergie sont des priorités.Les deux pilotes sont efficaces, mais le meilleur choix dépend principalement de la tension du moteur et des exigences de courant du projet.
Meilleures applications pour DRV8871
Les applications courantes du DRV8871 incluent :
• des petits véhicules robotisés,
• systèmes de convoyeurs et d'actionneurs,
• des serrures de porte intelligentes,
• des appareils moteurs alimentés par batterie,
• pompes et ventilateurs,
• la robotique éducative,
• et équipements d'automatisation industrielle.
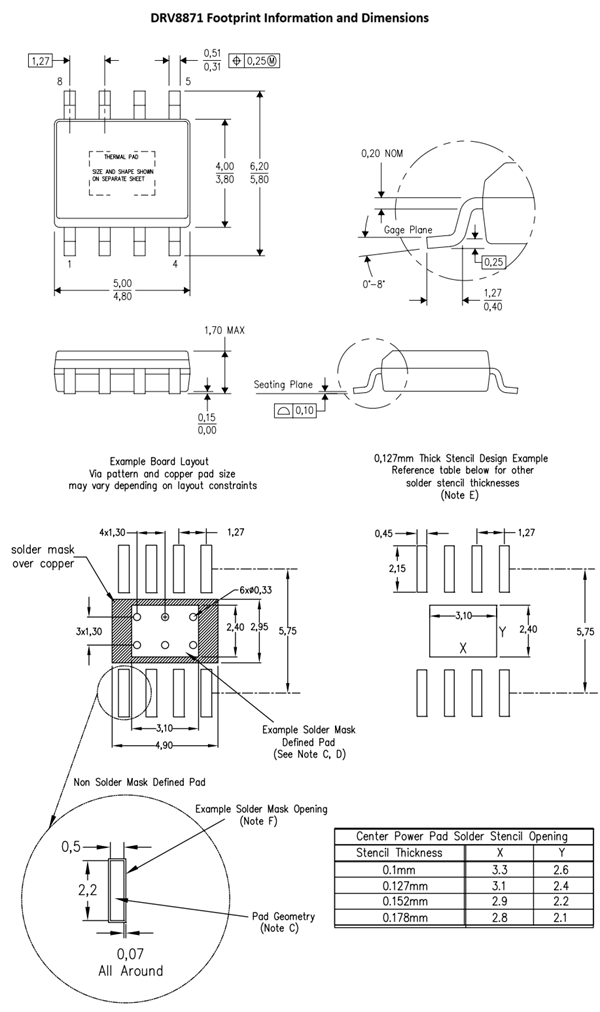
Dimensions mécaniques et disposition recommandée
Le DRV8871 vaut-il la peine d’être utilisé ?
Le DRV8871 vaut la peine d'être utilisé si vous avez besoin d'un pilote simple mais fiable pour un moteur à courant continu à balais.Ce n'est pas le meilleur choix pour les très gros moteurs, mais pour les projets de moteurs petits à moyens, il offre un bon équilibre entre puissance, protection et contrôle facile.Sa régulation actuelle, sa prise en charge PWM et ses fonctions de sécurité intégrées en font une meilleure option que de nombreux pilotes de moteur plus anciens, en particulier lorsque vous souhaitez un fonctionnement plus fluide et moins de problèmes de surchauffe.
Foire aux questions [FAQ]
1. Pourquoi le DRV8871 utilise-t-il la régulation de courant et comment améliore-t-il la fiabilité du moteur ?
Le DRV8871 utilise la régulation de courant pour limiter le courant moteur excessif lors des conditions de démarrage ou de surcharge.Cela aide à protéger le moteur et le pilote contre la surchauffe ou les dommages.
2. Quels sont les avantages du DRV8871 par rapport aux pilotes de moteur plus anciens comme le L298N ?
Le DRV8871 est plus efficace car il utilise des sorties MOSFET au lieu d'anciens transistors bipolaires.Il produit moins de chaleur, gaspille moins d’énergie et comprend de meilleures fonctionnalités de protection.
3. Pourquoi l'alimentation du moteur ne devrait-elle pas provenir directement de la broche Arduino 5V ?
Les moteurs à courant continu peuvent consommer un courant élevé susceptible de réinitialiser ou d'endommager l'Arduino.Une alimentation moteur séparée assure un fonctionnement plus sûr et plus stable.
4. Comment le pont en H à l'intérieur du DRV8871 contrôle-t-il la direction du moteur ?
Le pont en H change la direction du flux de courant à travers le moteur.Cela permet au moteur de tourner en avant ou en arrière.
5. Quelles sont les causes de la surchauffe du DRV8871 dans les systèmes moteurs ?
La surchauffe est généralement causée par un courant moteur excessif, des charges lourdes, un mauvais refroidissement ou une tension d'alimentation incorrecte.
6. Pourquoi les condensateurs sont-ils recommandés à proximité de l'entrée d'alimentation VM du DRV8871 ?
Les condensateurs aident à réduire les chutes de tension et le bruit électrique provoqués par les pointes de courant du moteur.Cela améliore la stabilité globale du système.
Article connexe
-
![Comprendre les spécifications, les classes de vitesse et les performances de la carte SD]() May 14 2026Comprendre les spécifications, les classes de vitesse et les performances de la carte SD
May 14 2026Comprendre les spécifications, les classes de vitesse et les performances de la carte SDCet article explique ce qu'est une carte SD, sa structure, ses spécifications, ses modes de communication, sa méthode de stockage, ses classes de vi...

Produits connexes

CGA5H4X7R2J102K115AE
CAP CER 1000PF 630V X7R 1206

CGA4J2C0G2A822J125AA
CAP CER 8200PF 100V C0G 0805

CC1812KKX7R0BB223
CAP CER 0.022UF 100V X7R 1812

CWR11FH336JB
CAP TANT 33UF 5% 10V 2917

MC74HCT374ADWR2G
IC FF D-TYPE SNGL 8BIT 20SOIC

XC1765EPD8C
IC PROM SERIAL CONFIG 65K 8-DIP

IRU3038CF
IC REG CTRLR BUCK/BOOST 14TSSOP

TPS72719YFFR
IC REG LINEAR 1.9V 250MA 4DSBGA

PIC32MZ2048EFH144-250I/PH
IC MCU 32BIT 2MB FLASH 144TQFP

SAF-XC164CS-16F20F
0726+ TQFP

AM27C256-90DC
27C256 - 256K (32KX8) CMOS EPROM

STK1270SBLQG
STK1270SBLQG SYNTEK

PCA9675D
PCA9675D NXP